Version: s26.1.6
Latest updates made on 6/5/2026
AER Embedded Systems Documentation
Welcome to the software and systems doc page for Anteater Electric Racing. This site is the shared starting point for onboarding, architecture, and implementation details across the team.
UPDATE for Spring Quarter 2026:
Currently pushing to make FSAE competition in June 2026.
Start Here:
- New to the project? Begin with onboarding:
- Looking for system-level context?
Subteam Split
Firmware
Firmware owns embedded control and safety-critical behavior on vehicle modules.
- CCM control firmware (sensor I/O, control logic, telemetry) (CCM Overview)
- PCC firmware for precharge sequencing and HV/LV safety interactions (PCC Overview)
- FreeRTOS task scheduling and CAN message flow (Tasks & Scheduling)
- Vehicle state machine, fault handling, power limiting, and wheel-speed sensing
Data Acquisition (DAC)
The DAC side focuses on telemetry transport, storage, visualization, and simulation tooling.
- CAN ISO-TP telemetry ingestion and decoding (CAN docs)
- MQTT broker startup and configuration (MQTT docs)
- Telemetry fan-out to MQTT and TDengine (Send docs)
- Dashboard + Raspberry Pi telemetry services
- Simulator efforts (Godot, inverter simulation, RL) (Simulator docs)
Current Focus Areas
- Tuning new Inverter and Motor Setup
- Thermal tuning to allow for maximum motor utilization
- Launch control tuning and slip-ratio based torque shaping
- Focus on tech compliance as per FSAE rules
Contributing to Docs
This site is built with mdBook and Mermaid support.
- Add or update markdown pages under
src/ - Keep navigation in sync through
src/SUMMARY.md - Run locally with
mdbook serve
If you are unsure where new content belongs, start in the relevant onboarding page and link deeper implementation details from there.
Onboarding
Author: Karan Thakkar
Relevant coding background to understand firmware
C++ reference and language: cppreference.com PlatformIO: platformio.org — helpful for faster prototyping and device management.
FreeRTOS official site and API reference: freertos.org
Debugging & diagnostics
- TBD (openCD?)
Relevant hardware background to understand firmware
Teensy 4.1: PJRC Teensy 4.1 - MCU board used in our stack
CAN protocol: Video
Custom PCBs
CCM
Controls all the sensor inputs + outputs and perform motor control calculations.
PCC
Automates the battery precharge sequence to mimize instaneous capacitor charging.
Codebase overview
Here is our codebase: https://github.com/Anteater-Electric-Racing/embedded
fsae-vehicle-fw
Contains all vehicle firmware for CCM (sensor interfacing + motor controls)
fsae-pcc
Contains all firmware for PCC sequence.
Author: Karan Thakkar
KZ –> MZ Updates
MZ is our 2026 competition spec car. It is an iteration of KZ, and as such you will find most of the firmware to be very similar.
This decision was made to minimize scope change and push UCI to bring their first vehicle to the annual FSAE competition.
Summary of Changes
- Reorganized file structures
- Firmware is split into:
src/
peripherals // handles low level drivers and wrappers for communication protocols
utils // useful constants
vehicle/
comms //communication handler over CAN
controls //custom algorithms designed for specific use cases
devices //logic level interface with peripherals and vehicle state
-
New Inverter: DTI HV550, new motor: EMRAX 228 MV
- The logic stays the same but the handler changes
-
New features include:
- Watchdog Timer
- Sensors Added (Wheel speed, Shock travel)
- Regen Braking Map
- Migrate Traction Control, Launch Control from KZ
- TSSI bypass per FSAE rules
- PCC thermistors data + Plug and Play Charging
- System derating based on temps
- Closed loop control of Fans/Pumps
Moving forward into Fall 2026
The goal is to create our own dev board, write more bare-metal code, and build the backend for reliable autonomy.
You can expect the firmware team to have minimal tasks as we transition to autonomy-centric but rather be a team that maintains a reliable system as hardware changes.
Author: Karan Thakkar
System Architecture
---
config:
theme: 'base'
themeVariables:
primaryColor: '#ffffffff'
primaryTextColor: '#000000ff'
primaryBorderColor: '#17007cff'
lineColor: '#000000ff'
secondaryColor: '#f3f3f3ff'
tertiaryColor: '#f3f3f3ff'
---
flowchart BT
%% This is a comment for the entire diagram
subgraph CAN[" "]
BMS(Orion BMS 2)
BC(Battery Charger)
PCC(PCC - Teensy 4.0)
INV(DTI HV550)
RPI(Raspberry Pi)
MOTOR(Motor) === INV
end
CCM(CCM - Teensy 4.1)
%%CAN LOOP1
BMS <--> |CAN1| BC <--> |CAN1| PCC <---> |CAN1| CCM
%%CANLOOP2
INV<-----> |CAN2|CCM<---> |CAN1 + CAN2|RPI
subgraph Analog[Analog]
direction LR
B(Brake Sensors)
A(Pedal Position Sensors)
LPOT(Suspension Travel Sensors)
TR(Thermistors)
end
subgraph PWM[PWM]
direction LR
W(WheelSpeed Sensors)
FP(Fans & Pumps)
SP(Speaker & Amp)
end
subgraph MISC[Digital]
direction LR
RTM(Ready To Move Button)
BL(Brake Light)
end
Analog --> CCM
PWM --> CCM
MISC -->CCM
---
config:
theme: 'base'
themeVariables:
primaryColor: '#ffffffff'
primaryTextColor: '#000000ff'
primaryBorderColor: '#17007cff'
lineColor: '#000000ff'
secondaryColor: '#f3f3f3ff'
tertiaryColor: '#f3f3f3ff'
---
flowchart LR
PCC(Precharge Status) --> CCM
A(Analog Inputs) --> CCM
D(Digital Inputs) --> CCM
CCM(Teensy MCU) --> IC(Inverter Commands) --> Motor(Motor Control)
CCM --> Raspi(Raspi) --> Dashboard(Dashboard: Driver + Pit)
CCM --> PWM(PWM Output) --> CC(Cooling Control)
style CCM fill:#00FF00,stroke:#333,stroke-width:2px
Tasks and Threads
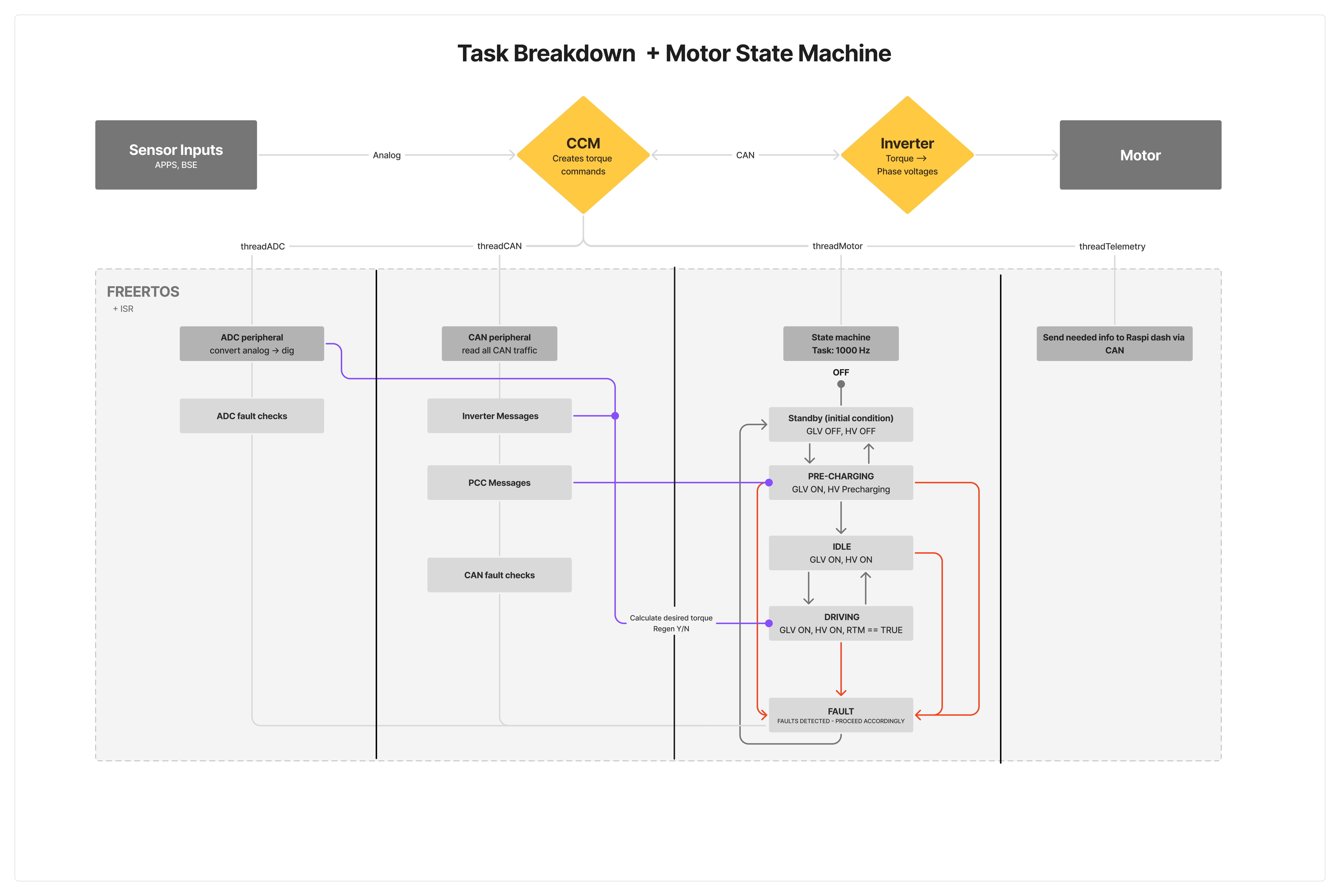
Author: Karan Thakkar
CCM: Central Computer Module
CCM is the main central vehicle board. Its main purpose is to acquire data from sensors across the car, use it in vehicle control commands and send over CAN to our Raspberry Pi.
CCM is powered by (1) Teensy 4.1 MCU which runs an ARM-Cortex-M7. We write our firmware in C++ and flash it to our board. The board communicates with various devices over analog, digital, CAN and i2C.
The full kicad files can be found here.
Current Version: 2.0
Schematic
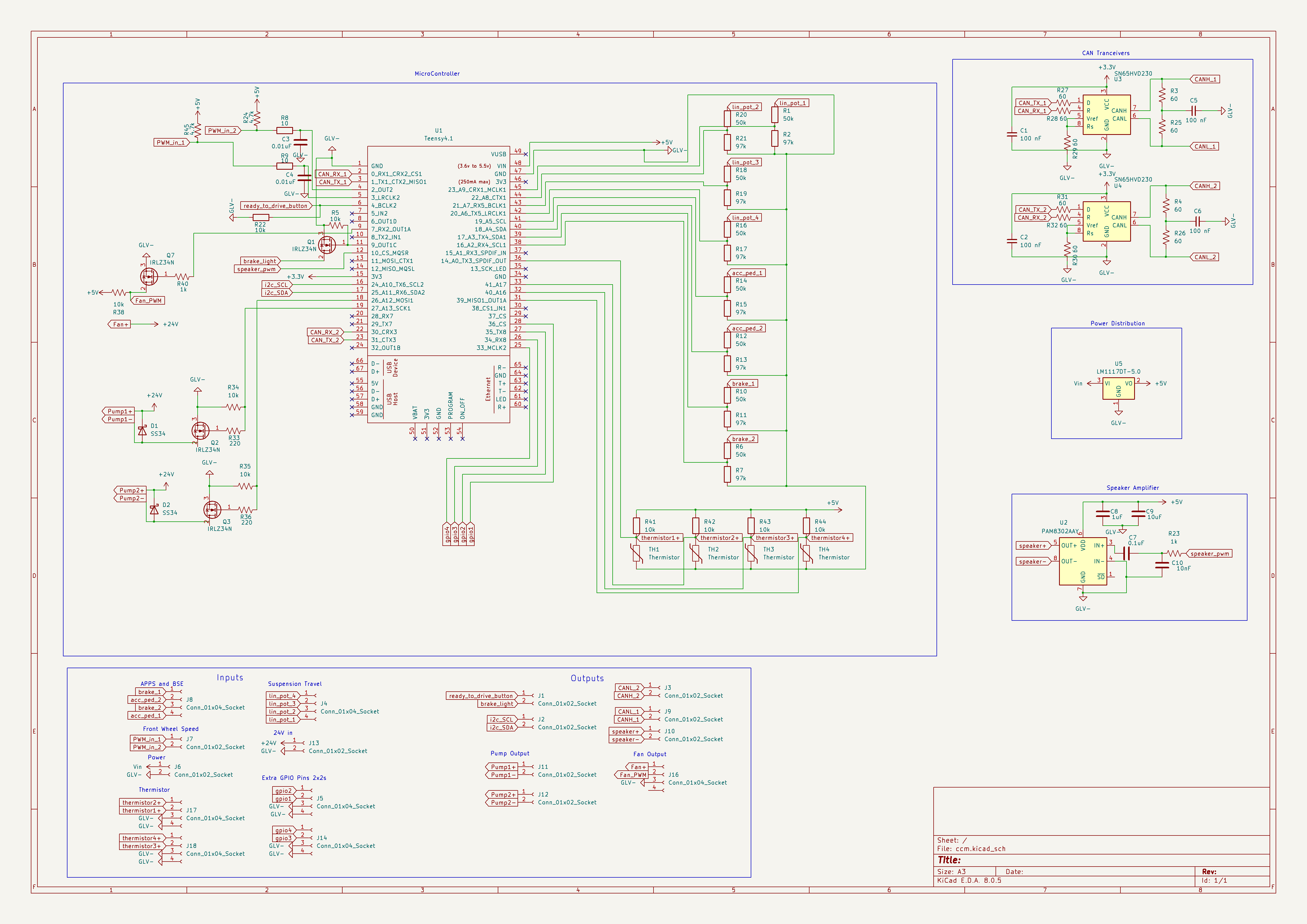
- The top left shows the MCU pinout
- The top right shows the CAN Tranceiver setup
- The bottom shows the I/O
PCB Layout
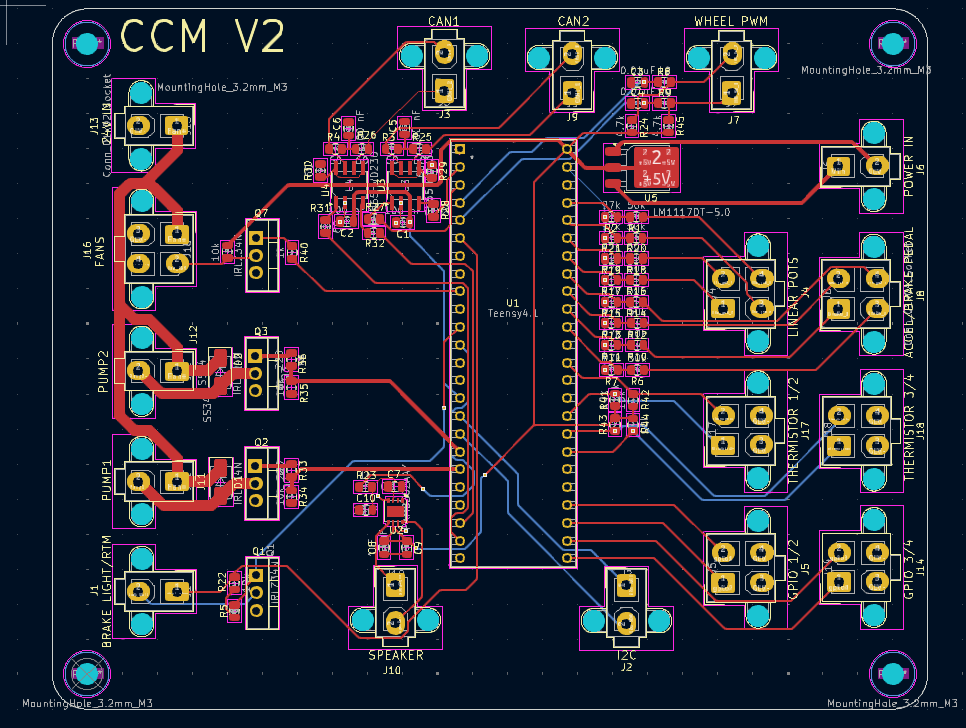
- The Right side holds all the analog inputs + 12v Power in
- The left side holds CAN1/CAN2 + PWM outputs from CCM as well as misc inputs.
Improvements
This board has planned improvments for a version (3.0) Some new features include
- More sensors inputs (Tire Temp, Brake Temp, Steering Wheel Angle)
- Switching to a custom dev board
- Bare metal system software and drivers
Author: Karan Thakkar
Peripherals
Digital I/O
RTM (Ready To Move) Button Input
The RTM input is handled as a standard digital GPIO read. It functions as a momentary push-button with software debouncing to avoid false triggering from mechanical bounce. Each press toggles the latched internal state between 0 and 1, allowing the system to reliably detect transitions. This signal is used in the vehicle state machine to move the car from the IDLE state into the RUNNING or DRIVE state once all safety conditions are met.
Brake Light Output
The brake light is driven as a digital output that activates based on braking conditions. Depending on system rules and logic, this signal can be turned on when:
- Brake pressure exceeds a threshold
- Regenerative braking torque is applied above a defined amount
- Other system-defined braking conditions are met The output is typically a high-side digital drive that activates the physical brake lamp in accordance with FSAE regulations.
Wheel Speed Sensors (WSS) Input
Author: Dylan Tran
Wheel speed sensors on all four wheels are hall-effect pickups producing a square-wave digital signal proportional to wheel rotation. Hardware interrupts trigger on the falling edge of these pulses to increment dedicated counters for each wheel.
This system ensures the vehicle can accurately monitor individual wheel speeds, allowing for traction control, odometry, telemetry, and dynamic vehicle control.
The firmware computes wheel rotational dynamics over a fixed 100ms interval utilizing the accumulated pulse count, the number of sensor teeth, and the wheel circumference.
Fans & Pumps Output
Two MOSFET-controlled outputs are available for driving the cooling fan and coolant pump. These are controlled through software feedback loops that monitor thermistor temperature readings. When temperature increases beyond a target setpoint, fan or pump duty cycle increases proportionally. When temperatures fall below defined limits, duty cycle is reduced. This provides automatic thermal regulation for the accumulator or power electronics cooling loop.
Ready to Drive Sound
Authors: Dylan Tran, Anushree Godbole
Audio signaling is performed using a PWM output connected to a low-pass filter and amplifier, which drives the tactile transducer. This is used to produce a tone for the Ready to Drive Sound (RTDS). A tactile transducer was selected in place of the conventional speaker to save space on the car. The tactile transducer is mounted on the car’s aerobody, which acts as a sound-radiating element.
The RTDS system ensures the car meets FSAE safety requirements for audible signaling before the drivetrain engages.
The Ready to Drive Sound is a continuous tone lasting 1–3 seconds (EV.9.7.2), triggered during the vehicle startup sequence.
Testing Results: Testing was performed by gradually increasing the supply voltage to 24 V and setting the amplifier potentiometer to its maximum position to verify compliance with the 80dB @ 2m requirement (EV.9.7 and IN.10.3).
Testing was performed in two rounds. In the first round, a standalone Teensy 4.1, low-pass filter, amplifier, and the tactile transducer was mounted directly on KiloZott’s aerobody (in ELF). The sound level was measured using a smartphone sound meter application, which recorded a peak sound level of 95 dB at a distance of 2 meters and an average sound level of approximately 90 dB over a 30-second period. During this test, tones ranging from 1 Hz to 1500 Hz were played in a continuous loop.
In the second round of testing, the components (Teensy 4.1, low-pass filter, and amplifier) were already integrated on Safety Board and CCM, which were harnessed together for testing. Since MegaZott’s aerobody was not yet available, a metal sheet was used as the mounting surface during this test in ECT. An exact sound pressure level was not recorded during the second test. Subjectively, the output volume was comparable to that measured during the first test, which exceeded the 80 dB requirement at 2 meters.
Based on testing results, the final RTDS implementation uses a 1300 Hz tone played for 3 seconds.
| Measurement Distance | Sound Level | Voltage | Status |
|---|---|---|---|
| 2 meters | 95 dB | ~24V | PASS |
Analog I/O
Brake System Encoder
A linear analog pressure transducer is used to measure hydraulic brake line pressure. The voltage is read via an ADC and mapped into engineering units using a calibration curve. Brake pressure is used to:
- Smoothly blend mechanical and regenerative braking
- Block acceleration torque while braking
- Activate brake lights
- Support telemetry and control algorithms
This sensor is part of multiple safety-critical paths and must be sampled and checked reliably.
Acceleration Pedal Position
The accelerator pedal position sensor outputs a variable voltage proportional to throttle demand. The reading is converted into a normalized torque request and fed into the torque controller. For safety, dual redundant channels are commonly monitored, and mismatches are checked to detect faults such as wiring damage or sensor failure. If readings disagree beyond limits, torque is disabled and a fault is raised.
Suspension Travel
Suspension position is measured by analog linear potentiometers These readings allow:
- Logging for vehicle dynamics analysis
- Dynamic control adjustments such as damping or traction control
Thermistors
Thermistors measure temperature in critical subsystems such as:
- Motor controllers
- Batteries and accumulator modules
- Cooling loops
- Power electronics
These readings are used in closed-loop thermal regulation. Raw voltage readings are converted using standard thermistor curve equations or lookup tables. If temperatures exceed defined safety thresholds, torque may be reduced, cooling activated, or the vehicle shut down depending on severity.
CAN
BMS
The Battery Management System communicates via CAN, sending essential data such as:
- Cell voltages
- Module temperatures
- Current consumption
- State-of-Charge and State-of-Health
- Fault flags and system warnings
The control system must consume these messages to maintain safe vehicle operation. If BMS signals a critical fault, the drivetrain must disable torque output immediately.
Battery Charger
During charging mode, the onboard charger exchanges CAN messages with the BMS and vehicle controller. Messages include:
- Charging current and voltage targets
- Charge state progress
- Fault and error reporting
The charger generally follows BMS instructions to ensure safe constant-current and constant-voltage charging curves.
PCC
The PCC (Pre Charge Circuit) communicates over CAN to exchange infor with the CCM. Data typically includes:
- Precharge state
- Precharge Progress
- TS/Accum Voltage read over frequency to voltage circuits
- Precharge time
The PCC and CCM coordinate to ensure safe charing of the inverter and HV side. Read more about this in the PCC section.
CCM
The CCM (Central Computer Module) acts as the main MCU for car.
- Broadcast system heartbeat messages
- Reads all sensor readings
- Receive driver input and button states
- Relay fault conditions
- Coordinate operation between subsystems
- Sends torque commands to the Inverter based on all readings
- Relays info to telemetry side.
Purpose
Process two pedal sensors and output a safe, normalized throttle value.
- Converts raw ADC → pedal % (0–1)
- Ensures both sensors agree
- Detects faults (electrical + plausibility)
- Prevents brake + throttle simultaneously
High Level Flow
Raw ADC → Filter → % Mapping → Voltage Check → Faults → Output
Update Function
APPS_UpdateData(raw1, raw2)
- Filter Inputs
- Apply low-pass filter (100 Hz)
- Smooths noise and spikes
- This helps keep the pedal signal stable instead of jumping around from tiny electrical fluctuations
- Convert to Pedal %
- Uses calibrated raw values:
rest → 0%
full → 100%
apps1 = LINEAR_MAP(raw1, REST1, FULL1, 0 → 1)
apps2 = LINEAR_MAP(raw2, REST2, FULL2, 0 → 1)
- This means the code is mainly built around real measured ADC values from the pedal, not just ideal voltages
- That makes calibration easier because the mapping matches the actual installed hardware
- Clamp Values
- Ensure:
0 ≤ APPS ≤ 1
- If the sensor goes slightly below rest or above full travel, the final output is still kept in a safe range
- Convert to Voltage Used for fault detection only:
voltage = ADC_VALUE_TO_VOLTAGE(raw)
- The code still converts raw readings into voltage so it can check for open-circuit or short-circuit behavior
- So percentage is based mainly on raw ADC calibration, while voltage is used mainly for electrical safety checks
- Voltage Safety Check
APPS1 (3.3V):
0.33V → 2.97V (fault range)
APPS2 (5V):
0.5V → 4.5V (fault range)
- If a sensor voltage goes outside these ranges for too long, the system raises an APPS fault
- This helps catch wiring issues, sensor faults, or readings that are no longer physically believable
- Sensor Agreement Check
difference = |APPS1 - APPS2|
If:
difference > 0.1 (10%)
→ FAULT
- Since the pedal uses two sensors, they should track each other closely
- If they disagree too much, the system treats that as unsafe
- Brake Plausibility Check
If:
Throttle > 25%
AND
Brake > threshold
→ FAULT
Reset when:
Throttle < 5%
- This prevents the car from accepting heavy throttle while strong braking is also being detected
Output
APPS = (APPS1 + APPS2) / 2
- The final pedal command is the average of both sensors
- This gives one clean throttle value to pass into the rest of the vehicle logic
ADS1115 Integration
The APPS code is fed by the ADS1115 external ADC.
In adc.cpp, the ADS reads the two pedal channels and passes them into:
APPS_UpdateData(raw1, raw2);
So the flow is:
Pedal sensor → ADS1115 → raw ADC counts → APPS_UpdateData()
Why use the ADS1115?
The ADS1115 gives 16-bit readings, which means it can measure the sensor signal with much finer resolution than a typical 12-bit onboard ADC.
That helps because:
- higher resolution gives smaller voltage steps between readings
- better precision makes pedal calibration cleaner
- less quantization error means smoother percentage mapping
- less noise sensitivity makes the signal easier to filter and trust
In simple terms, the ADS gives the APPS module a more detailed picture of what the pedal is doing.
Why that matters for APPS
Since APPS is safety-critical, better signal quality is valuable:
- small pedal changes are easier to detect
- the filtered signal is smoother
- the two sensors can be compared more accurately
- fault checks become more reliable
So while the APPS logic itself is mainly based on filtered raw counts and calibration, the ADS1115 improves the quality of those raw counts before APPS ever sees them.
Summary
APPS:
- Converts pedal → throttle
- Verifies sensor agreement
- Blocks unsafe conditions
The ADS1115 helps by giving high-resolution 16-bit sensor readings with better accuracy and lower effective noise, making the APPS signal cleaner and more trustworthy before torque is commanded.
Author: Sebastian Ethan Basa
ORION BMS (Battery Management System)
The purpose of the BMS is to monitor various aspects of the battery, protect its lifespan, and report any faults with the battery.
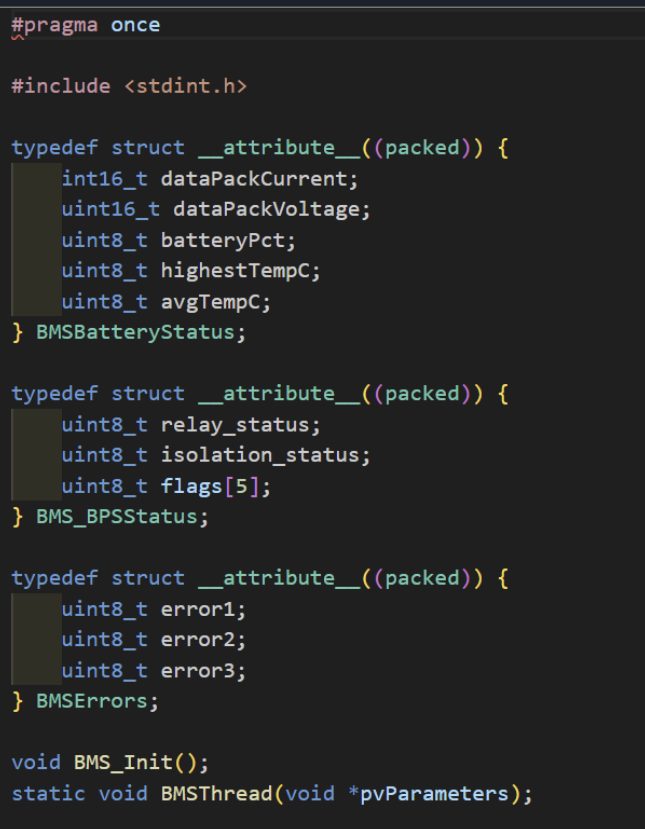
The BMS transmits data via CAN messages which have their own unique CAN IDs. Using C++ and FreeRTOS, we can retrieve the CAN data from the BMS in the form of data structs, which can be interpreted and used throughout the code to control the car. Some of the data values that the BMS can transmit include battery cell voltages, temperatures, battery health, and fault conditions.
Author: Pranav Kocharlakota
Wheel Encoder
Purpose
The wheel encoder module measures how fast a wheel is spinning, reporting the result in RPM (revolutions per minute). It works by detecting a gear attached to the wheel — each time a tooth on that gear passes a sensor, the module takes note of the timing and uses that to figure out how fast the wheel is turning.
How It Keeps Track of Speed
The module is always listening in the background. Whenever a gear tooth passes the sensor, it quietly records the exact time of that event and compares it to the previous one. That time gap is the key piece of information used to calculate RPM.
This listening happens automatically and independently from everything else the system is doing, so it never misses a pulse even while the rest of the program is busy.
If no gear tooth passes the sensor for more than half a second, the module assumes the wheel has stopped and reports 0 RPM. This prevents the system from showing a stale, outdated speed reading when the wheel is no longer moving.
Calculating RPM
Once the time between two pulses is known, the speed is calculated by figuring out how long a full rotation would take at that rate — accounting for the number of teeth on the gear — and converting that into revolutions per minute.
RPM = 60,000,000 / (Δt × N)
Where:
- Δt = time between the last two pulses (in microseconds)
- N = number of teeth on the gear
A gear with more teeth gives more frequent pulses, which means better accuracy at low speeds. A gear with fewer teeth gives fewer pulses, which is fine at higher speeds but less precise when the wheel is moving slowly.
Setup and Ongoing Use
The module has two distinct phases:
1. Startup When the system first powers on, the module sets up the sensor pin and tells the hardware to start listening for gear tooth signals automatically. This only needs to happen once.
2. Running While the system is operating, the module should be checked regularly (many times per second is ideal). Each check looks at the most recent pulse timing, applies the RPM calculation, and updates the current speed reading. Anything in the system that needs the wheel speed can then simply ask for the latest value.
Summary of Constants
| Setting | What It Controls |
|---|---|
| Sensor pin | Which physical pin on the board the sensor is connected to |
| Gear teeth | How many teeth are on the encoder gear |
| Timeout | How long to wait without a pulse before reporting 0 RPM (default: 0.5 seconds) |
Purpose
Design a function that converts 4 shock sensor ADC readings into usable shock travel values in millimeters for telemetry and suspension analysis.
The shock sensors are linear potentiometers whose signal sits close to 5 V when the shock is fully extended. When the suspension compresses, the voltage only decreases slightly.
The total useful signal range is approximately:
5.00 V → 4.86 V
So the actual change is only about 0.14 V.
Because the change is very small relative to the 5 V baseline, the code treats the difference from 5 V as the meaningful signal and scales that difference to the full mechanical travel of the shock.
Algorithm Overview
Initial Function
- Reset all stored shock sensor values
- Clear:
- raw ADC readings
- converted voltages
- shock travel values in mm
This ensures startup begins with known values instead of stale sensor data.
Update Function
-
Read 4 ADC values
- Inputs come in as
rawReading1throughrawReading4
- Inputs come in as
-
Invert ADC readings
- Each reading is converted using:
abs(4095 - rawReading)
- The ADC is 12-bit, meaning values range from 0 to 4095.
- Because the sensor voltage decreases during compression, the raw ADC value behaves opposite of the desired interpretation of travel.
- Subtracting from 4095 flips the scale so that increasing compression produces increasing processed signal values.
- Convert ADC counts to voltage
ADC_VALUE_TO_VOLTAGE(...)
This converts the processed ADC value into volts.
- Use
abs()on voltage
abs(ADC_VALUE_TO_VOLTAGE(...))
This ensures the voltage value is always non‑negative. It mainly acts as a safety guard against unexpected sign behavior.
- Map voltage difference to shock travel
The shock signal only changes by 0.14 V across its usable range:
5.00 V → 4.86 V
The code maps that small change to the full suspension travel using:
(voltage / 0.14f) * SHOCK_TRAVEL_MAX_MM
Conceptually this means:
| Voltage | Shock Travel |
|---|---|
| 5.00 V | 0 mm |
| 4.93 V | ~50% travel |
| 4.86 V | max travel |
- Clamp output
The computed travel is limited using:
constrain(value, 0.0f, SHOCK_TRAVEL_MAX_MM)
This prevents invalid sensor readings from producing impossible travel values.
Why abs() is used
1. Flipping the ADC scale
abs(4095 - rawReading)
The sensor begins near 5 V when fully extended, so the ADC reading starts close to the top of the ADC range.
As the shock compresses:
- Voltage drops slightly
- ADC value drops slightly
By subtracting from 4095, the scale is mirrored so the processed signal increases with compression.
The abs() ensures the result stays positive.
2. Protecting voltage conversion
abs(ADC_VALUE_TO_VOLTAGE(...))
This simply ensures the converted voltage value cannot become negative due to any intermediate math behavior.
The important calibration step is not abs() itself but recognizing that the signal range is only 0.14 V below 5 V.
Implementation Details
void Shock_Init()
Initializes all stored linear potentiometer data to zero.
Values cleared:
- raw ADC readings
- converted voltages
- shock travel values
This function runs once during startup.
void ShockTravelUpdateData(...)
Processes all four shock sensor ADC readings.
Steps:
- Flip ADC readings using
4095 - rawReading - Convert processed ADC values to voltages
- Interpret the small 0.14 V drop from 5 V as suspension compression
- Scale that voltage change into millimeters
- Clamp output values within the physical travel range
Linpot_GetData()
Returns a pointer to the shared linPots data structure.
Other modules can read:
- raw processed sensor values
- voltages
- shock travel in millimeters
This allows telemetry and future control algorithms to access suspension data.
Example
Example input
If the sensor is fully extended:
rawReading ≈ 4095
After inversion:
4095 - 4095 = 0
Voltage becomes near 5 V baseline, so travel ≈ 0 mm.
If the voltage drops by 0.07 V:
5.00 V → 4.93 V
That represents roughly half of the total 0.14 V span, so:
travel ≈ 0.5 × SHOCK_TRAVEL_MAX_MM
TESTING PLAN
Method Signature:
ShockTravelUpdateData(uint16_t rawReading1,
uint16_t rawReading2,
uint16_t rawReading3,
uint16_t rawReading4)
Constants:
ADC max count = 4095
voltage span = 0.14 V
minTravel = 0
maxTravel = SHOCK_TRAVEL_MAX_MM
TestCase 1 (Initialization)
Call:
Shock_Init()
Expected behavior:
- All voltages = 0
- All raw readings = 0
- All shock travel values = 0 mm
TestCase 2 (Fully Extended)
Inputs correspond to ~5 V:
rawReading ≈ 4095
Expected:
shockTravel = 0 mm
TestCase 3 (Mid Travel)
Voltage ≈ 4.93 V (half of 0.14 V span)
Expected:
shockTravel ≈ 0.5 × SHOCK_TRAVEL_MAX_MM
TestCase 4 (Full Compression)
Voltage ≈ 4.86 V
Expected:
shockTravel = SHOCK_TRAVEL_MAX_MM
TestCase 5 (Out of Range)
Voltage difference exceeds 0.14 V.
Expected:
constrain() clamps value to SHOCK_TRAVEL_MAX_MM
Author: Karan Thakkar
Vehicle Control
Motor/Inverter
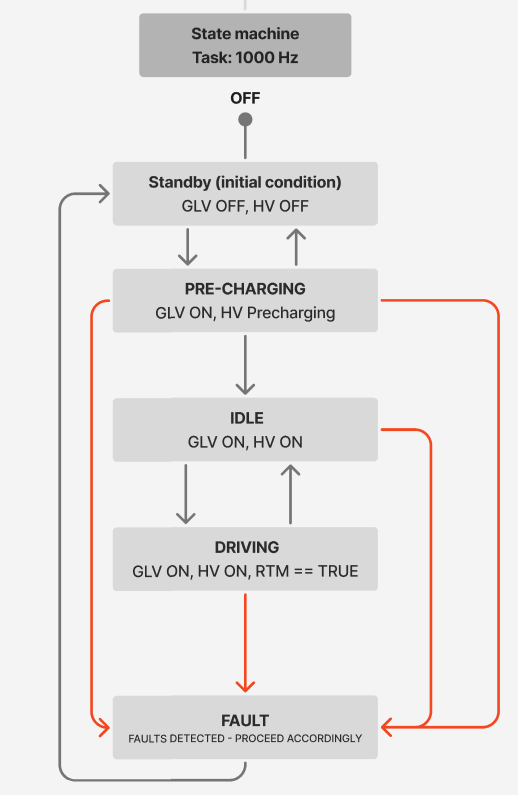
The motor inverter in this system is responsible for controlling how power flows from the high-voltage battery to the traction motor, and its behavior is managed through a well-defined state machine aligned with Formula SAE Electric vehicle requirements.
The inverter is commanded through CAN messages that include torque requests, motor mode, relay control, and system readiness.
Depending on the operating state—such as OFF, STANDBY, PRECHARGING, IDLE, DRIVING, or FAULT—the inverter receives different command values that ensure the vehicle only delivers torque when it is electrically safe to do so. During driving, the requested torque is converted into a percentage value that the inverter understands, while additional parameters like regen mode, gear mode, and allowable currents from the BMS are also communicated. This helps maintain smooth torque delivery and ensures that high-voltage operation meets safety rules set by FSAE.
The transitions between inverter states are based on system conditions such as the Ready-To-Move button, precharge status, BMS confirmations, and overall system health.
For example, the inverter does not enter the DRIVING state until the precharge process has completed, battery relays are confirmed closed, and the driver actively requests propulsion. If communication issues or electrical faults occur, the inverter is immediately commanded into a FAULT state to disable torque and open relays where needed.
By structuring inverter behavior around explicit state transitions and safety checks, the system guarantees predictable and rules-compliant operation while providing clear separation between low-voltage logic and high-voltage power control, which is a core requirement for competition-legal and reliable Formula SAE EV design.
State Machine
Fault Handling
This fault map system uses a single 32-bit variable to keep track of all vehicle faults. Each fault type has its own bit in the bitmap, and when a fault is detected, its bit is turned on. When the fault clears, the bit is turned off. This makes fault storage very compact and fast to check, which is helpful on embedded systems where memory and CPU time matter. The system can quickly tell if any fault is active or look at specific bits to see which ones are triggered.
The handler function then looks at the bitmap and sets the motor into a fault state if any fault is active. Right now, every fault is treated the same, but the structure is flexible enough to customize actions later, such as limiting torque for minor issues or shutting down the drivetrain for serious ones. This design keeps the code organized, easy to maintain, and simple to expand as the system grows.
PID Controller Module
Author: Pranav Rayapureddi
Purpose
A generic, reusable PID controller for any closed-loop control application. Integral windup is clamped to configurable limits set at initialization.
How It Works
computePID() implements a standard discrete PID:
| Term | Formula |
|---|---|
| Error | e = setPoint − input |
| Integral | ∫ e · dt, clamped to [windUpLimitMin, windUpLimitMax] |
| Derivative | (e − e_prev) / dt |
| Output | Kp·e + Ki·∫e + Kd·de/dt |
dtis computed from FreeRTOS tick counts viaxTaskGetTickCount() / configTICK_RATE_HZ.- Anti-windup: integral is hard-clamped each iteration to the limits set in
pidConfig(). - Caller is responsible for clamping to actuator limits.
Integration
PID myController;
pidConfig(&myController, WINDUP_MAX, WINDUP_MIN);
// In control loop:
float output = computePID(&myController, setPoint, input, KP, KI, KD);
pidReset() zeroes the integral, previous error, and timestamp — use it when re-enabling a controller after a fault or mode switch to prevent state carryover.
Limitations
- Gains (
Kp,Ki,Kd) are passed per-call rather than stored in the struct — caller must ensure consistent gains across iterations.
Traction Control Module
Author: Atharva Rao
Purpose
The traction control module prevents rear-wheel spin during acceleration by reducing the torque request sent to the inverter. It compares front (undriven) wheel speeds to the motor-derived rear wheel speed to detect slip, then applies a PID correction when slip exceeds a defined ratio.
Control Method
Slip Calculation
Slip is computed in VCU_GetSlip() using motor eRPM as the driven wheel speed reference, which is calculated through pole pairs and gear ratio:
motor_speed = (eRPM / POLE_PAIRS) / GEAR_RATIO
slip = (motor_speed − front_wheel_avg) / front_wheel_avg
The calculation also consists of an additional step: if the two front wheel speeds differ by more than MAX_SPEED_DIFF (35 RPM), the lower reading is used instead of the average to guard against a faulty sensor pulling the wheel speed reference high.
If the front wheel average falls below MIN_SPEED (5 RPM) — i.e., the car is nearly stationary, the function returns the target slip ratio directly, avoiding a division-by-near-zero.
PID Torque Reduction
The PID controller targets SLIP_RATIO (0.10) as its setpoint. Its output is a multiplicative reduction applied to the driver’s requested torque:
target = requested_torque − (requested_torque × PID_output)
This means that the correction scales with the driver’s pedal demand. For example, a large torque request gets a larger absolute cut when the calculated slip is high.
Note: The PID output is constrained so the torque cannot be increased beyond what the driver requested (This is implemented to abide by the rules).
Test Cases
Constants assumed: POLE_PAIRS = 10, GEAR_RATIO = 3, MIN_SPEED = 5 RPM, MAX_SPEED_DIFF = 35 RPM, SLIP_RATIO = 0.10, TC_KP = 0.5, TC_KI = 0.01, TC_KD = 0.0
Test Case 1 — No Slip
WSS1 = 100 RPM, WSS2 = 100 RPM, eRPM = 300000
requested_torque = 200 Nm
slip = (100 − 100) / 100 = 0.00
PID output = 0.5 × (0.00 − 0.10) = −0.05 → clamped to 0
torqueDemand = 200 Nm (unchanged)
Test Case 2 — Slip At Threshold
WSS1 = 100 RPM, WSS2 = 100 RPM, eRPM = 330000
requested_torque = 200 Nm
motor_speed = (330000 / 10) / 3 = 110 RPM
slip = (110 − 100) / 100 = 0.10
PID output = 0.5 × (0.10 − 0.10) = 0.00
torqueDemand = 200 Nm (unchanged)
Test Case 3 — Moderate Slip
WSS1 = 100 RPM, WSS2 = 100 RPM, eRPM = 360000
requested_torque = 200 Nm
motor_speed = (360000 / 10) / 3 = 120 RPM
slip = (120 − 100) / 100 = 0.20
PID output = 0.5 × (0.20 − 0.10) = 0.05
torqueDemand = 200 − (200 × 0.05) = 190 Nm
Test Case 4 — Heavy Slip
WSS1 = 40 RPM, WSS2 = 42 RPM, eRPM = 300000
requested_torque = 200 Nm
motor_speed = (300000 / 10) / 3 = 100 RPM, front_avg = 41 RPM
slip = (100 − 41) / 41 = 1.44
PID output = 0.5 × (1.44 − 0.10) = 0.67
torqueDemand = 200 − (200 × 0.67) = 66 Nm
Current Limitations
- PID gains (
TC_KP,TC_KI,TC_KD) are placeholder values and require tuning. - The target slip ratio (0.10) might require tweaking for effective traction control.
- Testing is yet to be done to ensure everything works well.
Purpose
Design a function that optimizes 0–60 mph acceleration by adjusting torque output based on slip ratio.
- Optimal slip ratio ≈ 7% (commonly 5–10% depending on car).
- If slip ratio exceeds optimal → decrease torque
- If slip ratio falls below optimal → increase torque
Algorithm Overview
Initial Function
- Validate and reset PID gains and internal PID state.
- Obtain constants (max torque, optimal slip target).
- Initialize launch control button to false (inactive until pressed).
Pre-Launch Phase
- Open loop torque ramp over 500ms, capped at 60% of
CAPPED_MOTOR_TORQUE - Transitions to Post-Launch when
freeSpeed > 0.1 mph, resets PID on transition - If Pre-Launch exceeds 2 seconds → exit to OPEN_LOOP
Post-Launch Phase
- Check button state
- If not pressed → output driver torque normally.
- Wheel speeds
- Controlled speed: rear wheel with higher speed.
- Free rolling speed: front wheel with lower speed.
- Slip Ratio
- slip = (controlledSpeed - freeRollingSpeed) / freeRollingSpeed
- Torque Logic
- If slip < 0.07 → increase torque.
- If slip > 0.07 → decrease torque.
- PID Correction
- Use
PID::computePID()for correction. - Add correction to driver torque.
- Clamp Torque
- If corrected torque > max → clamp to maxTorque.
- If < 0 → clamp to 0 Nm.
Implementation Details
LAUNCH_STATE_ON PRE_LAUNCH (0 → 0.1 mph)
- Get front wheel speeds (MPH), take slower as
freeSpeed - Check if elapsed time > 2s → exit to OPEN_LOOP
- If
freeSpeed > 0.1 mph→ transition to POST_LAUNCH, reset PID - Ramp torque linearly over 500ms, capped at 60% of
CAPPED_MOTOR_TORQUE
POST_LAUNCH (0.1 mph → launchTargetSpeed)
- Compute
controlledSpeedfrom motor eRPM × rpmConversion × wheelRadius - Compute slip ratio = (controlledSpeed - freeSpeed) / freeSpeed
- PID outputs correction, add to normalized
realTorque - Multiply by
CAPPED_MOTOR_TORQUE - Clamp target between
minTorqueandCAPPED_MOTOR_TORQUE - If
freeSpeed > launchTargetSpeed→ exit to OPEN_LOOP, reset PID.
LAUNCH_STATE_OFF
- Wait for:
- Motor speed = 0
- Launch button activated
- Then activate launch control (FSAE requires button activation — must update logic).
FAULT State
- Triggered by irregular wheel speeds or invalid conditions.
TESTING PLAN
Constants:
slipTarget = 0.7f
minTorque = 0.0f
maxTorque = 260.0f
wheelRadius = 0.35f
rpmConversion = 0.3f
INTEGRAL_MAX = 20.0f
INTEGRAL_MIN = -20.0f
launchTargetSpeed = 10.0f
TestCase 1 (Entry Condition)
eRPM = 0.0 pedalAccel = 1.0 (fully pressed) driveStrategy = OPEN_LOOP Expected: launchState → PRE_LAUNCH, driveStrategy → LAUNCH_CTRL, PID reset
TestCase 2 (PRE_LAUNCH Ramp)
timeElapsed = 0.25s (halfway through ramp) freeSpeed = 0.0 mph Expected: target = 0.3 × CAPPED_MOTOR_TORQUE (30%, halfway to 60% cap) launchState = PRE_LAUNCH
TestCase 3 (PRE_LAUNCH → POST_LAUNCH Transition)
freeSpeed = 0.15 mph (crosses 0.1 threshold) Expected: launchState → POST_LAUNCH, PID reset
TestCase 4 (POST_LAUNCH high slip)
wheelSpeedFL = 40 mph, wheelSpeedFR = 42 mph, controlledSpeed = 100 mph realTorque = 200 Nm (normalized: 0.77) slipRatio = (100 - 40) / 40 = 1.5 → very high slip PID correction → negative target reduced toward minTorque = 0 Nm
TestCase 5 (POST_LAUNCH low slip)
wheelSpeedFL = 100 mph, wheelSpeedFR = 99 mph, controlledSpeed = 100 mph realTorque = 250 Nm (normalized: 0.96), slip slightly below 0.07 PID correction → positive target → clamped at CAPPED_MOTOR_TORQUE = 260 Nm
TestCase 6 (PRE_LAUNCH timeout)
timeElapsed = 2.1s, freeSpeed = 0.0 mph (car never moved) Expected: driveStrategy → OPEN_LOOP, launchState → PRE_LAUNCH
TestCase 7 (Exit — throttle lifted)
driveStrategy = LAUNCH_CTRL APPS_GetAPPSReading() = 0.03 (below 0.05 threshold) Expected: driveStrategy → OPEN_LOOP, PID reset
TestCase 8 (Exit — target speed reached)
freeSpeed = 11.0 mph (above launchTargetSpeed = 10.0) Expected: driveStrategy → OPEN_LOOP, launchState → PRE_LAUNCH, PID reset
Thermal Regulation Module
Author: Pranav Rayapureddi
Purpose
Maintain safe operating temperatures for the coolant pumps and radiator fan using closed-loop PID control, adjusting PWM duty cycles in response to live temperature data before hardware thresholds are reached.
How It Works
thermal_regulate() runs three independent PID controllers — one per actuator — against a shared temperature input. Each controller returns a normalized scalar in [0.0, 1.0] representing cooling effort, which maps to a PWM duty cycle.
computePID() Behavior
computePID() is a custom PID function designed specifically for thermal regulation.
| Term | Formula |
|---|---|
| Error | e = input − setPoint |
| Integral | ∫ e · dt, accumulates only when output ∈ (0, 1) |
| Derivative | (e − e_prev) / dt |
| Output | Kp·e + Ki·∫e + Kd·de/dt, clamped to [0, MAX_OUTPUT], then divided by MAX_OUTPUT |
dtis computed from FreeRTOS tick counts viaxTaskGetTickCount() / configTICK_RATE_HZ.- If
input < setPoint, the controller resets state and returns 0 — no cooling below threshold. - Anti-windup: integral only accumulates when the actuator is unsaturated.
Output Inversion
Higher cooling effort requires a higher duty cycle, so the PID output is inverted before writing:
pwmDuty = DUTY_CYCLE_MAX × (1 − pidOutput)
Integration
float temp = max(DTI_GetDTIData()->controllerTemp, DTI_GetDTIData()->motorTemp);
float fanOutput = computePID(&fan, FAN_THRESHOLD, temp, FAN_KP, FAN_KI, FAN_KD);
float pump1Output = computePID(&pump1, FAN_THRESHOLD, temp, PUMP1_KP, PUMP1_KI, PUMP1_KD);
float pump2Output = computePID(&pump2, FAN_THRESHOLD, temp, PUMP2_KP, PUMP2_KI, PUMP2_KD);
analogWrite(FAN_PIN, DUTY_CYCLE_MAX * (1 - fanOutput));
analogWrite(PUMP1_PIN, DUTY_CYCLE_MAX * (1 - pump1Output));
analogWrite(PUMP2_PIN, DUTY_CYCLE_MAX * (1 - pump2Output));
PID states are static locals in thermal_regulate() and persist across calls. PWM is initialized at 25 kHz (ANALOG_WRITE_FREQUENCY) in thermal_Init(). thermal_forceOn() and thermal_forceOff() bypass PID for fault states or bench testing.
Limitations
- All gain constants are placeholder values requiring physical tuning.
Regenerative Braking
Anoop Koganti
Goal
Design a mapped braking system that properly integrates motor braking for optimal regenerative braking while providing a validated and tuned transition from motor braking to mechanical braking.
High-Level Overview
System Flow
Brake System Encoder
↓
CCM
↓
Motor Regen Command
↓
Motor Braking (0-20% Encoder Travel)
↓
Mechanical Braking (>20% Encoder Travel)
↓
Brake Pressure Generated Through Excess Slack
Concept
- The brake encoder is used as the primary input.
- The CCM reads the encoder value and determines the requested braking level.
- The first 20% of calibrated brake travel is dedicated to regenerative braking.
- Regen torque is linearly mapped from 0% to 100% over this range.
- After 20% brake travel, regen remains at its maximum value.
- Additional brake pedal travel engages the mechanical braking system through intentional slack in the brake linkage.
- Mechanical brake pressure must be tuned to account for the additional braking force produced by the motor.
Update Function
int BrakesRegen(int EncoderADC);
Function Purpose
- Takes brake encoder ADC readings as input.
- Maps encoder position from the calibrated 0-20% brake travel range.
- Outputs a regenerative braking request from 0-100%.
- Sends the corresponding negative torque request to the motor controller.
Example Mapping
| Encoder Travel | Regen Output |
|---|---|
| 0% | 0% |
| 5% | 25% |
| 10% | 50% |
| 15% | 75% |
| 20% | 100% |
| >20% | 100% |
Mechanical Braking Considerations
Brake Bias Tuning
The rear motor contributes braking torque during regenerative braking. Mechanical brake pressure must therefore be tuned such that total vehicle braking remains balanced.
Areas requiring validation:
- Front-to-rear brake balance
- Vehicle stability during braking
- Smooth transition from regen-only braking to regen + mechanical braking
- Driver pedal feel
Calibration Approach
- Begin with conservative regen values.
- Incrementally increase regen contribution.
- Record stopping behavior and vehicle response.
- Adjust brake pressure and slack distance as necessary.
- Validate consistency across multiple runs.
Initial Test Cases
Test 1: Encoder Range Mapping
Input
Encoder values corresponding to:
- 0%
- 5%
- 10%
- 15%
- 20%
Expected Result
Regen command increases linearly from 0% to 100%.
Verification
Confirm motor controller receives the expected negative torque command.
Test 2: Regen Saturation
Input
Encoder values greater than 20% travel.
Expected Result
Regen remains capped at 100%.
Verification
Motor torque command does not increase beyond the calibrated maximum.
Test 3: No Brake Input
Input
0% brake travel.
Expected Result
0% regenerative braking.
Verification
No negative torque command is sent to the motor.
Test 4: Mechanical Brake Transition
Input
Brake pedal moved from below 20% to above 20%.
Expected Result
- Regen reaches maximum at 20%.
- Mechanical brakes begin contributing after slack is removed.
- Braking force increases smoothly.
Verification
No sudden jump in braking force.
Test 5: Low-Speed Behavior
Input
Brake applied while vehicle speed approaches zero.
Expected Result
Regen is reduced or disabled at low speed.
Verification
Vehicle comes to a smooth stop without oscillations or jerking.
Test 6: BMS Fault Handling
Input
BMS reports a charging fault or disables charging.
Expected Result
- Regen command immediately becomes zero.
- Mechanical braking remains available.
Verification
- No negative motor torque is requested.
- Vehicle can still brake mechanically.
Test 7: Motor Controller Fault Handling
Input
Motor controller fault condition.
Expected Result
- Regen command immediately becomes zero.
- Mechanical braking remains available.
Verification
- No regenerative torque request is sent.
- Vehicle can still brake mechanically.
Test 8: Repeatability Test
Input
Repeated brake applications at identical encoder positions.
Expected Result
Same encoder value produces the same regen command each time.
Verification
Mapping remains stable and repeatable.
Future Work
- Determine optimal regen percentage range.
- Determine ideal slack distance before mechanical brake engagement.
- Tune brake bias for motor-assisted braking.
- Add battery current limiting.
- Add state-of-charge-based regen limiting.
- Add thermal derating based on motor and battery temperature.
- Collect braking data for validation and tuning.
Author: Karan Thakkar
Tasks & Scheduling
The firmware is structured using FreeRTOS to split the vehicle control system into separate tasks, each handling its own area. ADC readings, motor control, telemetry, and high-level control all run in their own threads, so critical operations don’t get blocked by slower tasks. For example, threadADC continuously samples analog sensors, while threadMotor handles the motor state machine, updates torque, and communicates with the VCU and BMS over CAN. This keeps motor commands and sensor updates running on a predictable schedule, which is important for safe and reliable operation in the car.
The threadMain task is used for testing and user interaction. It reads input from the serial monitor to adjust torque, change vehicle states, and toggle regen, while also printing telemetry like motor speed, current, and temperatures. threadTelemetry collects and sends key vehicle data over CAN on a regular cycle. Separating everything into different threads makes the system easier to debug, maintain, and expand. FreeRTOS handles scheduling, so high-priority tasks like motor control always run reliably, while less critical tasks like user input don’t interfere.
Watchdog Timer
In Progess
Author: Pranav Kocharlakota
CAN Interrupt Handler
Overview
CAN_RxInterruptHandler replaces a constantly polling system — where the processor would repeatedly check if a message had arrived — with one that only runs when a message actually arrives. When triggered, it takes the message’s ID and data, bundles them into a CANMessage_t struct, and drops it into a queue. This frees the processor to do other work between messages rather than burning cycles checking for them.
The Queue
The queue holds up to 10 messages at a time. If a message arrives when the queue is full, it is dropped and the overflow counter increments. However, messages should be cleared from the queue faster than the queue can be populated so the overflow counter acts as a safety and testing mechanism. If a task was waiting on the queue, the handler wakes it up immediately after adding the message.
Why It’s Kept Short
The handler runs at a higher priority than everything else, blocking all other execution while it runs. Doing anything beyond packaging and queuing would stall the system. The actual processing of each message happens separately, at normal priority.
Testing Plan
1. Normal Operation
Goal: Confirm CAN messages are being received and processed correctly with no overflow.
- Power on the system with all devices connected to the CAN bus.
- Open the Serial Monitor and confirm that CAN messages are being printed — precharge data is readable by the CCM and inverter commands are being received.
- Monitor the Serial Monitor for the duration of the test. If no overflow message appears, the handler is working correctly.
- Cross-check the received values against known expected values (e.g., correct voltage, temperature, SOC) to confirm data is not being corrupted in transit.
- If no overflow message is printed and values look correct, the code is functioning as expected. Stop here.
2. Overflow Debugging (Fallback)
Goal: Identify why overflow messages appeared in step 1.
- Open CANalyzer and connect to the bus. Log all incoming messages and note the total message rate per second and which IDs are transmitting. Ensure that it is only essential devices and all are transmitting at normal rates.
- The size of the queue may be too small increase it by 10 until overflow is gone. The ideal size of the queue is between 10 and 30.
- Do not increase the queue by huge increments. This is because a large queue takes more memory and more importantly a large queue paints over possible issues with transmission rates of other devices.
Authors: Anushree Godbole, Kenneth Dao
Watchdog Timer (WDT) Implementation
Overview
The Watchdog Timer (WDT) subsystem is implemented to ensure the reliable operation of critical vehicle control software. Its primary function is to detect software stalls or timing violations in key tasks and enforce recovery through a system reset.
This implementation operates at the thread level and monitors the execution health of four critical threads:
- ADC Thread
- Main Thread
- VCU Thread
- CAN Thread
If any thread fails to update within a defined threshold, the watchdog is no longer fed, allowing the Teensy’s hardware watchdog to reset the system.
System Architecture
The watchdog does not maintain persistent fault states; all checks are performed on live thread timing data during each evaluation cycle.
The WDT system consists of:
- Hardware Watchdog Peripheral (via
Watchdog_t4) - FreeRTOS Monitoring Task (
threadWDT) - Timing Tracking Variables (
*_last_run_tick) - Bitmask-Based Overdue Thread Detection
Each monitored thread updates its own timestamp (*_last_run_tick) whenever it executes successfully. The watchdog task periodically checks these timestamps to determine whether all critical threads are executing as expected.
Overdue Thread Detection Strategy
The system uses a time-based detection approach:
- Each thread must update within a defined threshold
- The watchdog task runs periodically to evaluate thread health
- A thread is considered overdue if the elapsed time since its last heartbeat exceeds the threshold
During each watchdog evaluation cycle, a bitmask is used to identify which threads are overdue. This allows multiple thread failures to be tracked simultaneously and enables easy scalability for additional monitored components.
Bitmask Representation
Overdue threads are encoded using a bitmask:
| Thread | Bit | Value |
|---|---|---|
| ADC | 0 | 0b0001 |
| Main | 1 | 0b0010 |
| VCU | 2 | 0b0100 |
| CAN | 3 | 0b1000 |
WDT_REQUIRED_MASK = 0b0000indicates that no threads are overdue and the system is healthy- If any thread is marked as overdue, the watchdog is not fed.
Timing Relationship: Detection vs. Reset
The watchdog system uses two distinct timing parameters that serve different purposes:
-
100 ms (Thread Timing Threshold):
Maximum allowable time between thread updates before a thread is considered overdue. -
1 second (Hardware Watchdog Timeout):
Defines how long the system can go without being fed before the hardware watchdog triggers a reset of the Teensy 4.1.
Watchdog Behavior
The watchdog operates on a strict all-threads-healthy requirement:
-
Healthy System:
All monitored threads update within their thresholds → watchdog is fed continuously -
Overdue Thread Detected:
One or more threads exceed their timing threshold → watchdog is not fed -
System Response:
If the watchdog is not fed within its configured timeout (1 second), the hardware automatically resets the Teensy 4.1
This ensures that any persistent software failure results in a full system restart.
Diagnostics and Logging
When an overdue thread is detected, the watchdog logs the condition via serial output:
| Condition | Message |
|---|---|
| ADC Thread overdue | “WDT: ADC thread overdue” |
| CAN Thread overdue | “WDT: CAN thread overdue” |
| Main Thread overdue | “WDT: Main thread overdue” |
| VCU Thread overdue | “WDT: VCU thread overdue” |
Authors: Anushree Godbole, Kenneth Dao
CAN Bus Fault Detection Implementation
Overview
The CAN Bus fault detection subsystem is implemented to monitor whether CAN communication is running reliably. Its primary function is to detect when CAN messages stop being received within the required timing window and set a system fault when communication becomes stale.
This implementation monitors:
- CAN receive activity
- Latest healthy CAN message timestamp
- CAN communication timeout
- CAN fault state through the system fault bitmask
If no healthy CAN receive update occurs within the defined threshold, the system sets a CAN fault.
System Architecture
The CAN fault detection system consists of:
- CAN Receive Handler
- CAN Health Timestamp (
canLatestHealthyStateTime) - Current CAN Task Timestamp (
can_last_run_tick) - FreeRTOS Tick-Based Timing Check
- Bitmask-Based Fault System
Each time a CAN message is successfully received, the system updates the latest healthy CAN timestamp. The CAN monitoring logic then compares the current CAN runtime tick against the latest healthy receive time.
Fault Detection Strategy
The system uses a time-based communication timeout approach.
The CAN age is calculated as:
canAgeMs = (can_last_run_tick - canLatestHealthyStateTime) *
portTICK_PERIOD_MS;
If the CAN age exceeds the fault threshold, the CAN fault is set:
if (canAgeMs > CAN_FAULT_TIME_THRESHOLD_MS) { // 100 ms
Faults_SetFault(FAULT_CAN);
} else {
Faults_ClearFault(FAULT_CAN);
}
This means the CAN system is considered healthy only if a recent CAN receive event has occurred within the allowed time window.
Fault Representation
CAN faults are represented using the vehicle fault bitmask.
| Fault | Bit | Value |
|---|---|---|
| CAN Fault | 7 | 0x1 << 7 |
The CAN fault is defined as a single bit in the shared fault mask:
FAULT_CAN = 0x1 << 7
When the CAN fault condition is detected, this bit is set. When CAN communication returns to a healthy state, the bit is cleared.
Timing Relationship
The CAN fault detection uses a 100 ms timeout threshold:
-
Healthy CAN communication: A CAN receive update occurs within 100 ms
-
Fault condition: No healthy CAN receive update occurs for more than 100 ms
-
System response:
FAULT_CANis set in the fault bitmask
This timing prevents the system from using stale communication data while still allowing short timing variations.
CAN Behavior
The CAN fault logic follows a simple receive-health requirement:
-
Healthy state: CAN messages are being received regularly, and
canLatestHealthyStateTimeis updated -
Overdue state: The time since the last healthy CAN receive exceeds
CAN_FAULT_TIME_THRESHOLD_MS -
Fault response:
Faults_SetFault(FAULT_CAN)is called -
Recovered state: CAN messages resume within the expected window, and
Faults_ClearFault(FAULT_CAN)is called
This allows the system to automatically detect both communication loss and recovery.
Fault Handling & Diagnostics
The CAN fault is handled through the shared vehicle fault system.
| Condition | Fault Action |
|---|---|
| CAN age ≤ 100 ms | Faults_ClearFault(FAULT_CAN) |
| CAN age > 100 ms | Faults_SetFault(FAULT_CAN) |
Because the CAN fault uses the shared bitmask system, it can be checked alongside other faults such as APPS, BSE, and watchdog-related faults.
Testing and Validation
The CAN fault logic can be validated by observing whether the fault bit changes correctly during normal and failed communication.
Testing should include:
- Confirming
canLatestHealthyStateTimeupdates on every CAN receive - Verifying
FAULT_CANstays cleared during normal CAN traffic - Stopping CAN messages and confirming
FAULT_CANis set after 100 ms - Restoring CAN messages and confirming
FAULT_CANclears - Checking that the CAN fault appears correctly in the shared fault bitmask
This confirms that the system correctly detects stale CAN communication and reports it through the vehicle fault system.
ADC Polling to Interrupts
By Wilson Nguyen
Overview
Currently, the CPU is polling the ADCs on the Teensy, which blocks the CPU until the ADC task is done. This is synchronous I/O. However, this wastes CPU compute and power because while the CPU is waiting for the I/O event to finish, it is not making progress on other tasks.
The new method utilizes the Teensy’s DMA (direct memory access) hardware and interrupts to efficiently move the ADC data from the ADC registers into a buffer in RAM via DMA. DMA is a specialized hardware mechanism that allows peripheral devices to directly transfer data to or from RAM without CPU involvement. Once the buffer is full, an interrupt signal is generated and the ISR uses a direct-to-task notification to wake the ADC task. The ADC task writes the data from the buffer into a struct, which the CAN task will then transmit over the CAN bus.
The goal is to free the CPU from having to manually poll and read the ADCs and allow it to spend time progressing with other tasks.
Architecture
1. PIT (Periodic Interrupt Timer)
- Generates a trigger pulse (
PIT_TRIGGER0andPIT_TRIGGER1) every 1 ms / 1 kHz.
2. XBAR
- Internal signal router.
- Routes
PIT_TRIGGER0->XBAR1_OUT103->ADC_ETC_TRIG00. - Routes
PIT_TRIGGER1->XBAR1_OUT104->ADC_ETC_TRIG01.
3. ADC ETC (External Trigger Controller)
- Receives the XBAR output signal.
- Starts the chain to sample ADC channels in a specific order.
- Sends trigger pulses to ADC to rotate channels.
- Gives the ADC hardware trigger sequence to the ADC driver.
4. ADC1
- 1 or 0 depending on whether you are reading the documentation or the code, but it is the first ADC.
- Performs the actual analog-to-digital conversions at a 12-bit resolution.
- Passes conversion results back to the registers.
5. ADC ETC Result Registers
- Stores completed ADC results.
- Triggers a DMA request upon conversion completion.
6. DMA MUX
- Routes ADC ETC’s DMA request to DMA channel 23.
7. DMA
- Moves data from ADC ETC result registers into a buffer in RAM2.
- We use RAM2 because it is a general-purpose on-chip RAM and the DMA bus can freely move data to and from RAM2.
8. DMA Interrupt
- After the ready buffer is complete, the interrupt fires and the DMA ISR (interrupt service routine) executes.
- The ISR uses ping-ponging to prevent any read-write conflicts:
- First, we set the
ready_buffer(buffer the CPU will read from) to theactive_buffer(buffer the DMA just wrote to). - Then, we clear the old ADC data in the CPU cache because the CPU needs to read fresh data.
- Next, we swap the
active_bufferto the other buffer inadc_dma_buffer. - After that, we clear the
active_bufferso that the DMA can safely write to it. - Finally, we wake the ADC decoder task via a direct-to-task notification.
- First, we set the
9. ADC Task
- Wakes up and passes the data to the respective sensor peripherals for proper scaling and struct storage.
Sensor to ADC Channel Mapping
| Sensor | Analog pin | Pad name | ADC1 channel |
|---|---|---|---|
| Linear potentiometer 1 | A9 | GPIO_AD_B1_09 | ADC1_IN14 |
| Linear potentiometer 2 | A8 | GPIO_AD_B1_08 | ADC1_IN13 |
| Linear potentiometer 3 | A7 | GPIO_AD_B1_11 | ADC1_IN0 |
| Linear potentiometer 4 | A6 | GPIO_AD_B1_10 | ADC1_IN15 |
| APPS1 | A5 | GPIO_AD_B1_00 | ADC1_IN5 |
| APPS2 | A4 | GPIO_AD_B1_01 | ADC1_IN6 |
| BSE1 | A3 | GPIO_AD_B1_06 | ADC1_IN11 |
| BSE2 | A2 | GPIO_AD_B1_07 | ADC1_IN12 |
Testing / Verification
Testing has not been fully completed. However, a full testing plan would be to set up a test bench consisting of the Teensy and, if possible, all 8 sensors connected to the Teensy. An initial test plan would be to connect a PSU to the Teensy and supply a voltage of 0-3.3 V and test if we are getting the correct readings.
Author: Karan Thakkar
Telemetry
Current Version: HIMaC testing:
telemetryData = {
.APPS_Travel = APPS_GetAPPSReading(),
.motorSpeed = MCU_GetMCU1Data()->motorSpeed,
.motorTorque = MCU_GetMCU1Data()->motorTorque,
.maxMotorTorque = MCU_GetMCU1Data()->maxMotorTorque,
.motorState = Motor_GetState(),
.mcuMainState = MCU_GetMCU1Data()->mcuMainState,
.mcuWorkMode = MCU_GetMCU1Data()->mcuWorkMode,
.mcuVoltage = MCU_GetMCU3Data()->mcuVoltage,
.mcuCurrent = MCU_GetMCU3Data()->mcuCurrent,
.motorTemp = MCU_GetMCU2Data()->motorTemp,
.mcuTemp = MCU_GetMCU2Data()->mcuTemp,
.dcMainWireOverVoltFault =
MCU_GetMCU2Data()->dcMainWireOverVoltFault,
.dcMainWireOverCurrFault =
MCU_GetMCU2Data()->dcMainWireOverCurrFault,
.motorOverSpdFault = MCU_GetMCU2Data()->motorOverSpdFault,
.motorPhaseCurrFault = MCU_GetMCU2Data()->motorPhaseCurrFault,
.motorStallFault = MCU_GetMCU2Data()->motorStallFault,
.mcuWarningLevel = MCU_GetMCU2Data()->mcuWarningLevel,
};
This telemetry section acts as a real-time summary of everything important happening in the drivetrain during HIMaC testing. It records the driver’s accelerator pedal position so we know how much torque is being requested at any given moment. Keeping this information in one place makes it easy to log, monitor, and analyze how the system responds under different conditions.
It also gathers detailed status information from the motor controller, including actual motor speed, delivered torque, voltage, current, and temperatures. These values help confirm that the system is performing as expected and staying within safe operating limits. Along with this, the telemetry captures the current operating modes and internal controller states, giving a clear picture of what the motor system is actively doing.
In addition, the telemetry includes a set of fault and warning indicators that report when something abnormal has occurred, such as overcurrent, overspeed, overheating, or voltage problems. These alerts allow the system to react quickly by limiting torque or switching into a safer mode. Overall, this telemetry structure provides a clean and organized snapshot of the drivetrain’s condition, making testing, troubleshooting, and performance analysis much easier.
All this data is sent over CAN to our Raspberry PI in 1 packet.
PowerLimit_Update()
Purpose
This function ensures the car does not request motor torque which exceeds two important torque threshold requirements. The two cases in which this function would intervene are when max requested power exceeds 80kW (EV.3.3.1) and when the accumulator SOC is < 20%, in which rules specify that we must linearly reduce allowed power down to 0 at 5%.
Structure
Given above is a block diagram of the PowerLimit_update() function. In our codebase, PowerLimit_update() is called inside motor.cpp, during Motor_UpdateMotor()’s MOTOR_STATE_DRIVING state. The variable torqueDemand is given as an argument to Motor_UpdateMotor(), and this is then passed into our function, and finally returned and assigned to motorData.desiredTorque. A function somewhere else in the codebase will then read this value and send it to the motors, creating the actual torque requested.
In addition to torqueDemand, PowerLimit_Update() requires accumulator voltage and current as well as accumulator SOC. Voltage and current are multiplied to find power.
Implementation
There are a few constants used in this method, all of which are defined inside /utils/utils.h. What these all represent and what they are used for are as follows:
SOC_START, SOC_END
Represents the percentage (as a decimal) at which SOC-based torque limiting (derating) begins and ends. As of 10/2025 they are set to .2 and .05, respectively. Derating will begin at SOC_START, and will linearly reduce until reaching SOC_END, when torqueDemand will be 0.
MOTOR_MAX_TORQUE
Represents the maximum torque that the car is designed to output. Measured in N*m. This is used to linearly scale the torqueLimit proportionally based on SOC.
POWER_THRESHOLD_kWh
Represents maximum power allowed in FSAE rulebook. When calculated power is over this amount, driverTorqueCmd gets scaled down by this threshold divided by the calculated power. The assumption behind this is that power and torque are proportional, meaning that when calculated power is 10% above the threshold, driverTorqueCmd gets scaled down accordingly by 10%.
SOC derating amount is calculated and then stored inside the local variable torqueLimit, which is assigned to driverTorqueCmd at the end. Power limiting doesn’t use torqueLimit, it just directly sets driverTorqueCmd.
Testing
Method signature:
PowerLimit_Update(float soc, float voltage, float current, float driverTorqueCmd)
Constants:
MOTOR_MAX_TORQUE = 260.0F
POWER_THRESHOLD_kWh = 90
SOC_START = 0.2
SOC_END = 0.05
Test case 1 (base case):
PowerLimit_Update(.25, 40, 2, 200);
Returns 200
Test case 2 (MOTOR_MAX_TORQUE condition checking):
PowerLimit_Update(.25, 40, 2, 270);
Returns 260
Test case 3 (POWER_THRESHOLD_kWh condition checking):
PowerLimit_Update(.25, 40, 3, 200);
Returns 150
Test case 4 (SOC derating checking):
PowerLimit_Update(.1, 40, 2, 200);
Returns 66.67
Test case 5 (SOC end derating checking):
PowerLimit_Update(.05, 40, 2, 200);
Returns 0
Thermal Derating Module
Author: Atharva Rao
Purpose
Prevent the BMS and AIRs from triggering a hard reset by reducing torque and current limits before hardware-enforced thresholds are reached. Derating is applied across the battery, motor, and inverter, which takes effect on every torque command sent to the DTI.
How It Works
VCU_Derate(float temperature) returns a scalar factor in [0.2, 1.0] using piecewise linear interpolation between two temperature thresholds:
| Constant | Value | Meaning |
|---|---|---|
TEMP_START | 70 °C | Derating begins |
TEMP_MAX | 100 °C | Maximum derating (factor = 0.2) |
factor = 1.0 − (0.8) × (temp − TEMP_START) / (TEMP_MAX − TEMP_START)
Below TEMP_START the factor is 1.0 (no derating). Above TEMP_MAX the input is clamped and the factor floors at 0.2.
Integration
Three factors are computed independently each VCU loop iteration and the minimum is used:
float batteryFactor = VCU_Derate(BMS_GetOrionData()->highTemp);
float motorFactor = VCU_Derate(DTI_GetDTIData()->motorTemp);
float inverterFactor = VCU_Derate(DTI_GetDTIData()->controllerTemp);
float smallestFactor = min(batteryFactor, min(motorFactor, inverterFactor));
DTI_SetDCLimits(60.0 * smallestFactor, -2.0);
DTI_SetACLimits(150.0 * smallestFactor, -20.0);
DTI_SendAccelCommand(targetTorque * smallestFactor);
Both the CAN-sent current limits and the torque command are scaled by the same factor, so all three limit layers (BMS config, DTI config, CCM CAN override) are adjusted together.
Limitations
- A single linear ramp is used for all three thermal sources, no per-component curves.
- All temperature thresholds are placeholder (TEMP_START, TEMP_MAX, MIN_FACTOR) which require adjustments.
Authors: Adam Wu, Anna Lee, Anay Shiledar
Pre-Charge Circuit
The pre-charge circuit is a subsystem that ensures that the accumulator (battery) will charge safely by limiting the inrush current to the car’s tractive system when the car is first powered on. The tractive system (TS) refers to the Inverter and Motor of the car as a unit. Limiting the current protects the rest of the system from potential damage. Accumulator-TS current doesn’t actually flow through the PCC , but rather the PCC will monitor their respective voltage levels and control the relays which connect Accumulator and TS. In the event of a shutdown, PCC is able to control relays and completely disconnect the accumulator from the TS. Watch this video for a great explanation on why we need such a system, ours is very similar: https://www.youtube.com/watch?v=6-RndXZ5mR4
Hardware
How It Works
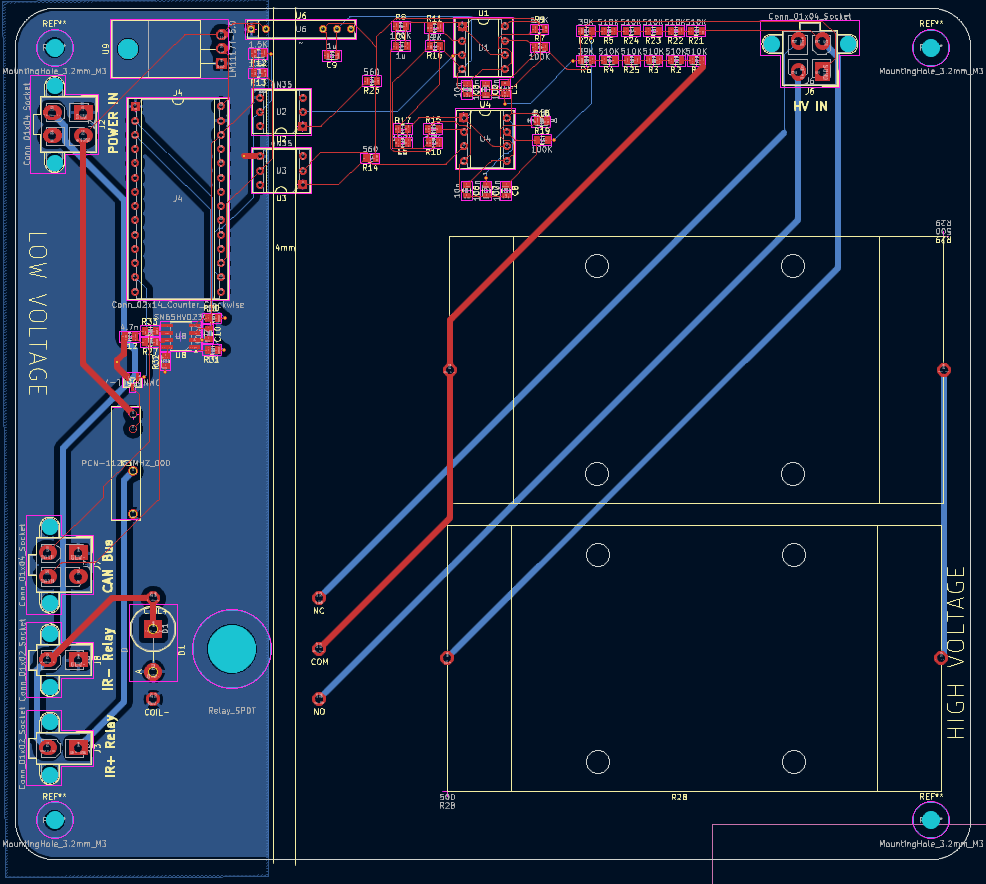
The PCC is split into two halves, high voltage (HV) and low voltage (LV). The HV side deals with accumulator and tractive system voltages which routinely go up to 400 V, while the LV side does not exceed 12 V. The FSAE rulebook specifies that there must be separation between these two voltage levels. However, we still need to communicate betweeen the two sides, as the teensy needs to read the voltages of accumulator and TS, both of which are on the HV side. In our circuit, this is accomplished using two optocouplers. Optocouplers achieve voltage separation utilizing an LED on one side (in this case HV) which will internally light up when there is a signal, and a phototransistor on the other side which will react to that LED.
HV Side
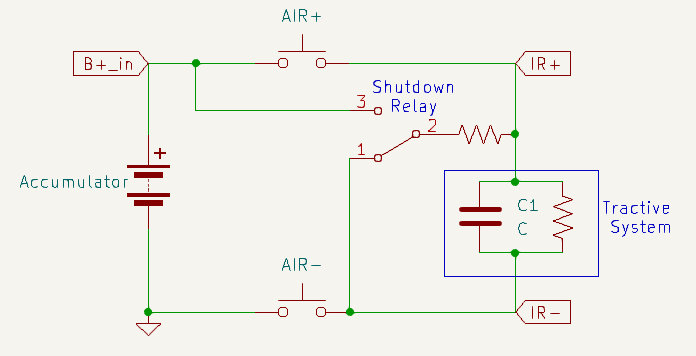
Here is a schematic demonstrating our system. The PCC is constantly reading accumulator voltage and tractive system voltage which come from B+_in and TS+, respectively. These are the most important connections to the system, and are fed into the board with a 2x2 molex connector. To read the voltages, the circuit utilizes two voltage to frequency converters, with input voltages that are stepped down with a voltage divider resistor network to be 1/10 of the actual value.
There are two Accumulator Isolation Relays (AIRs) in the PCC: AIR+ and AIR-. These AIRs are open air contact relays, capable of isolating very high voltages. In addition, there is a shutdown relay, which functions as a two way switch. We will refer to the shutdown relay as closed when it’s in position 1, and open when it’s in position 2. The precharge sequence and the states of these 3 relays during them is as follows:
Precharge: AIR+ is open, AIR- and shutdown relay are closed, TS is slowly and safely charged through the resistor. End of precharge: When TS+ is 70% of B+_in, the onboard teensy will tell AIR+ to close, bypassing the resistor. The system is ready. Error state: When we receive a shutdown signal through Shutdown_in or from a too fast/too slow precharge (see video for explanation if confused), AIR+/- and shutdown relay open. This configuration disconnects the accumulator and safely discharges the tractive system.
LV Side
Most of the complexity of the circuit are for the V2F converters, and those largely don’t need to be worried about. What is important to understand here is that the V2F converters convert an analog voltage to a signal with a frequency proportional to that voltage. Meaning: the V2F output signal is oscillating between 1 and 0. When vin is high, that oscillation will be faster, and when it is low that oscillation will slow down.
Using the optocouplers to maintain separation, that signal is fed to the teensy which then samples that data, and is able to control the rest of the circuit. The detailed implementation of these LM331 V2F converters involve capacitors and resistors which should be tuned to special values, but for this discussion of the PCC we will not dive into that.
Additionally, information on TS voltage, accumulator voltage, and error data are being sent over CANBUS to the CCM. This requires two teensy pins and utilizes a CAN transciever module.
Temperature Safety Check
Author: Lawrence Chan
Two thermistors are also located on the LV side in order to stop the precharge sequence if the temperature is too high, which may be indicatative of a failure in the hardware. A formula relating the temperature to the ADC reading across the thermistors are used in order to properly monitor the temperature of the board.
The thermistors are wired as shown in the schematic below:
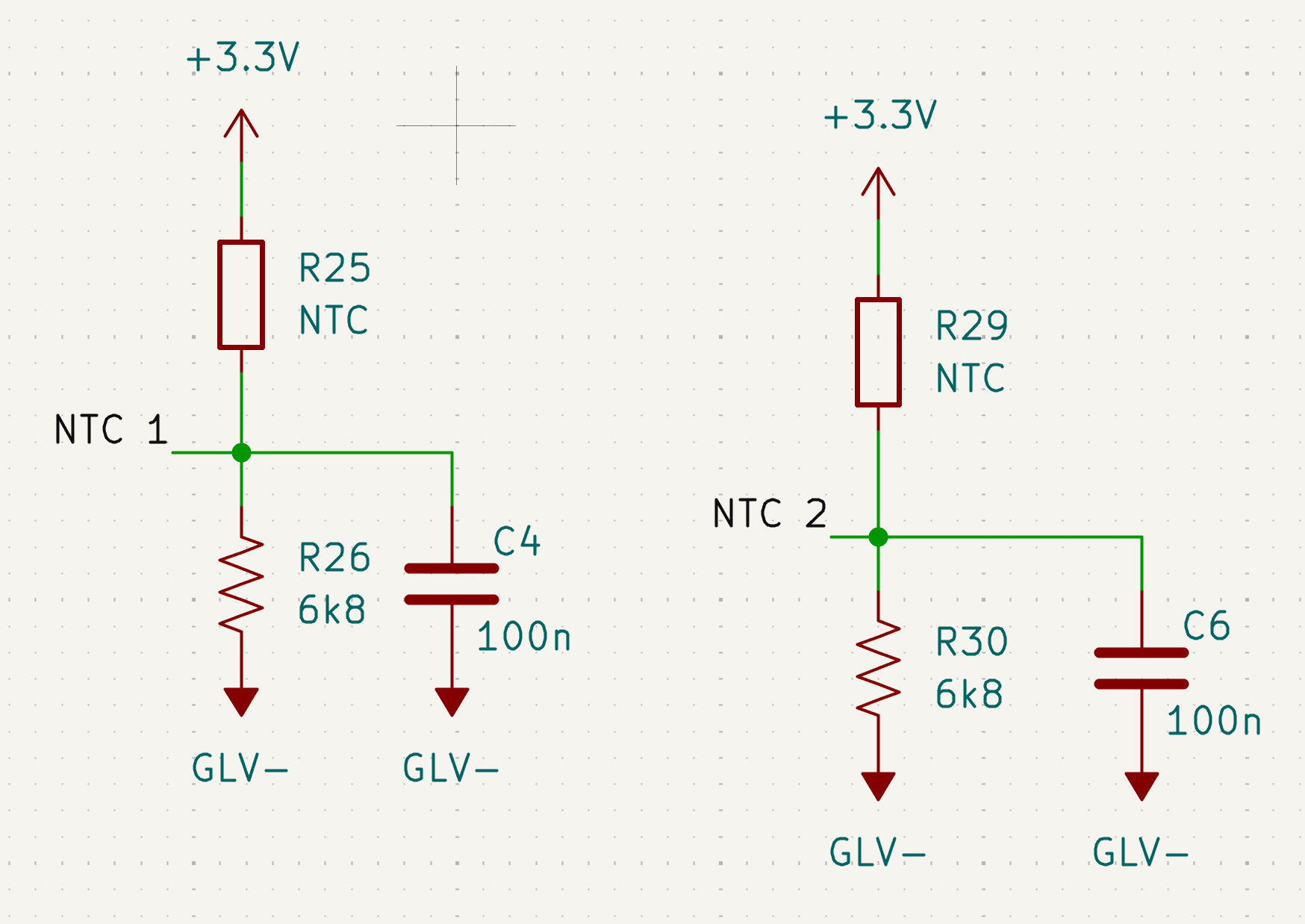
Relevant methods:
checkSafeTemperature(): Checks for the temperature of the precharge circuit through two thermistors located on the board. Sets precharge start to STATE_DISCHARGE if the temperature threshold is exceeded during precharge.
The following equation was used to calculate the temperature of the thermistors from the ADC reading as measured by the Teensy:
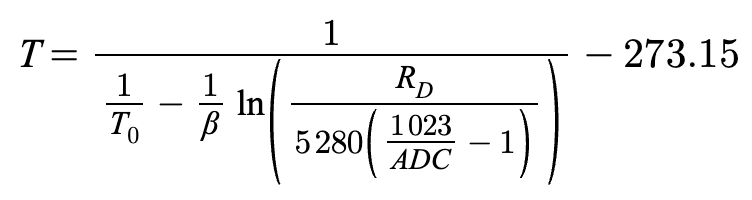
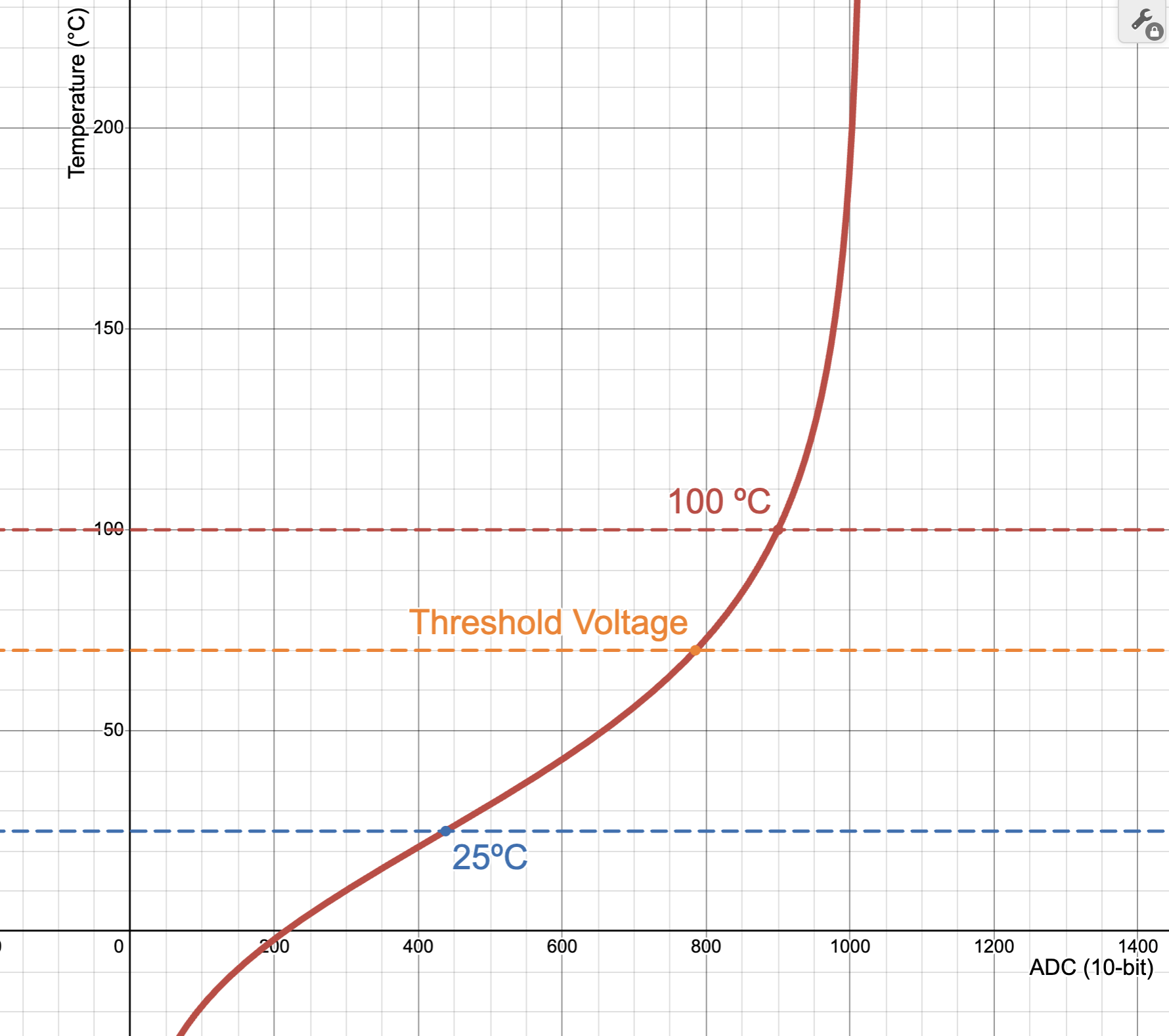
Relevant constants for the equation:
T0 (Celsius) = 26
R0 = 5280
BETA = 3880
Resistor Divider Resistor = 6800
Threshold Temperature (Celsius) = 70
Connecting Everything and Testing
Setting up the PCC can be confusing, and since it deals directly with accumulator voltage levels, it is important to understand how the wiring and connections work. Each of the connectors and what each pin is for are as follows:
HV IN TS+/-: positive and negative terminals of the tractive system B+_in: Accumulator-side AIR+ pin GNDS: Accumulator-side AIR- pin
POWER IN Shutdown_in: active high shutdown signal that triggers safe discharging of tractive system GLV-: Ground for GLV 12V: Positive terminal of GLV, or a 12 V power supply
IR+ Relay and IR- Relay Shutdown_in: active high shutdown signal that triggers safe discharging of tractive system GLV-, IR+_GND: ground signals
CAN Bus CANH/CANL: used for communication with CCM and other modules
Setup To test or use PCC, in addition to the board itself, you will need:
- two open air relays
- one 12 V source
- Accumulator or a 400 V power supply
- Motor+Inverter or some capacitor to represent the load
To hook up the accumulator to the inverter, take the two open air relays and decide which of them be AIR+ and AIR-. Connect one pin from AIR+ to Accumulator+ and one pin from AIR- to Accumulator-. The other pin of AIR+ goes to the positive terminal of the actual tractive system, and the other pin of the AIR- goes to the negative terminal of the tractive system. Definitely triple check this configuration. Make sure everything is isolated, it’s a good idea to use electrical tape over the contactors to avoid accidental shorting.
Now that the high-voltage components are hooked up, we need to connect the wires that allow PCC to monitor voltage levels. Connect the TS AIR+ pin to the TS+ pin of the HV IN connector, and the TS AIR- pin to TS-. Connect the accumulator AIR+ pin to B+_in, and the accumulator AIR- pin to GNDS. You will need to crimp wires and prepare a 2x2 molex connector.
Finally, we need to connect the PCC to the relays, so it can control them and open them in the case of a fault. The IR+/- ports correspond to AIR+/-, respectively. Simply connect them to their respective relays with Shutdown_in as the high input and with GND as low. After connecting CAN, the PCC is properly set up.
Software
Important Modules
General Overview
As mentioned in HV, the PCC is constantly reading the accumulator voltage and tractive system voltage and printing them to the serial monitor. As it does so, it transitions between five possible states: STANDBY, PRECHARGE, ONLINE, CHARGING, and ERROR.
- STANDBY (
void standby()): The initial/idle state of the PCC. Waits for a stable shutdown circuit (SDC). Opens accumulator isolation relays (AIR) and precharge relay. If the accumulator voltage is greater than or equal to the minimum voltage for the shutdown circuit (PCC_MIN_ACC_VOLTAGE), transitions into the PRECHARGE state. Also transitions into PRECHARGE if the BMS reports that charger safety is active (CAN_IsChargerSafetyActive()). - PRECHARGE (
void precharge()): Closes AIR- and precharge relay. Monitors precharge progress, which is a function of the tractive system voltage and accumulator voltage. If the precharge progress is completed (prechargeProgress >= PCC_TARGET_PERCENT), checks if the target percentage was reached too quickly. If so, transitions into the ERROR state. Otherwise, transitions into the CHARGING state if the BMS reports charger safety is active, or the ONLINE state if not. If the precharge is too slow, it will also transition into the ERROR state. - ONLINE (
void running()): The status that indicates that precharge has safely and successfully completed. Closes AIR+ to connect accumulator (ACC) to tractive system (TS) and opens precharge relay. If the BMS reports that charger safety becomes active (CAN_IsChargerSafetyActive()), transitions into the CHARGING state. - CHARGING (
void charging()): The state entered when the car is being charged by an external charger connected to the BMS. Keeps AIRs closed and periodically prints charger box data received from the BMS (pack voltage, charge current limit, rolling counter) to the serial monitor. Returns to STANDBY when the BMS clears the charger safety flag, and to DISCHARGE if accumulator voltage falls belowPCC_MIN_ACC_VOLTAGE. Transitions into ERROR if no BMS charger status CAN frame has been received withinBMS_CAN_TIMEOUT_MS(1500 ms), settingERR_BMS_CAN_TIMEOUT. - ERROR (
void errorState()): The PCC error status. Opens AIRs and precharge relay.
epoch refers to system time (?)
main.cpp
void setup(): Initializes GPIO pins and the precharge system.
void threadMain(): Continuously reads accumulator voltage and tractive system voltage and switches between the four states based on corresponding conditions.
precharge.cpp
getFrequency(int pin): Gets frequency of a square wave signal from a GPIO pin.
getVoltage(int pin): Converts the frequency into voltage for accumulator or tractive system GPIO pins.
prechargeInit(): Initializes the mutex and precharge task.
prechargeTask(void *pvParameters): Handles the state machine and status updates.
void standby(), void precharge(), void running(), void charging(), void errorState(): See General Overview.
float getTSVoltage(): Gets the tractive system voltage.
float getAccumulatorVoltage(): Gets the accumulator voltage.
PrechargeState getPrechargeState(): Returns the current precharge state (undefined, standby, precharge, online, or error).
getPrechargeError(): Returns current error information as an error code.
gpio.cpp
Initializes GPIO pins (shutdown control pin, accumulator pin, tractive system pin).
can.cpp
Handles CAN bus communication on CAN2 at 500 kbps: transmits PCC telemetry to the CCM and receives charger box data from the BMS. Two BMS frames are filtered in via the FIFO (everything else is rejected): the charger status frame (BMS_CHARGER_STATUS_CAN_ID = 0x185) and the charger command frame (BMS_CHARGER_CMD_CAN_ID = 0x306). Incoming frames are drained on a dedicated FreeRTOS task that runs every 2 ms, independent of the precharge state machine. Decoded charger data is held in a static ChargerData struct and exposed through accessor functions that use taskENTER_CRITICAL/taskEXIT_CRITICAL for atomic reads.
CAN_Init(): Initializes the CAN2 peripheral, sets the baud rate, configures FIFO filters for the BMS charger status (0x185) and command (0x306) IDs, and creates the canTask.
CAN_SendPCCMessage(state, errorCode, accumulatorVoltage, tsVoltage, prechargeProgress): Packs the current PCC state, error code, accumulator voltage, tractive system voltage, and precharge progress into a CAN frame and transmits it on the PCC CAN ID (0x222). Called once per precharge task cycle.
canTask(void *pvParameters): Dedicated FreeRTOS task that calls pollMessages() on a 2 ms period to drain the CAN rx FIFO.
pollMessages(): Reads any pending frames from the rx FIFO. On a charger status frame (0x185), decodes the safety flag from bit 3 of byte 6 (CHARGER_SAFETY_MASK = 0x08) and stamps the last-received tick. On a charger command frame (0x306), and only while charger safety is active, decodes the pack voltage (bytes 0–1, scaled by 0.1 V), the charge current limit (byte 2, scaled to A), and the BMS rolling counter (byte 6).
bool CAN_IsChargerSafetyActive(): Returns whether the BMS most recently reported charger safety as active. Used by the state machine to enter and exit the CHARGING state.
TickType_t CAN_GetBMSLastRxTime(): Returns the FreeRTOS tick at which the last BMS charger status frame was received. Used by the CHARGING-state watchdog to detect a BMS CAN timeout (BMS_CAN_TIMEOUT_MS).
float CAN_GetChargerVoltage(): Returns the last pack voltage reported by the BMS in the charger command frame.
float CAN_GetChargerCCL(): Returns the last charge current limit reported by the BMS.
uint8_t CAN_GetChargerCounter(): Returns the BMS rolling counter, used to verify that fresh charger command frames are still being received.
Improvements + next steps
- Clean up code (get rid of duplicate and unncessary comments)
- Replace B+_in and TS+ wire housings which barely fit inside 2x2 molex connectors
Author: Alistair Keiller
Onboarding
Relevant coding background to understand DAC
Git: Video || Article Rust: Book && Rustlings Cargo: Guide (sections 1-2, optionally 3) Iced.rs: Short Guide Tokio.rs: Tutorial
Relevant hardware background to understand DAC
Raspberry Pi 5: Fun Video Teensy 4.1: Fun Video CAN protocol: Video
Codebase overview
Here is our codebase: https://github.com/Anteater-Electric-Racing/embedded
fsae-dashboard
This dashboard displays current critical information to the driver.
fsae-raspi
Runs on the Raspberry Pi and handles all telemetry ingestion and storage. It polls ISO-TP CAN data from can0, decodes it into typed telemetry, and fans it out to an embedded rumqttd MQTT broker and a TDengine time-series database.
See the CAN docs, MQTT docs, and Send docs for details.
Author: Mikayla Lee
AER Telemetry over CAN ISO-TP
Overview
This system receives motor-controller telemetry over CAN ISO-TP, decodes it into strongly typed data, and forwards it for downstream processing. It also includes vCAN-based test utilities for CI.
Function: read_can_hardware
Purpose: Continuously reads and decodes telemetry packets from can0
Workflow:
- Opens an ISO-TP socket on
can0(source ID0x666, destination ID0x777) - Retries socket creation on failure with a 1-second backoff
- Reads incoming packets asynchronously, validates packet length, and parses raw bytes into
TelemetryDatausing Deku - Captures a timestamp with
now_ms()and forwards viasend_message(data, ts)
Error Handling:
- Logs socket creation failures and malformed packets
- Logs packets with trailing bytes after decode
- Re-enters socket setup if packet reads stop or fail
Function: read_can
Dispatches to hardware ISO-TP reception (can0) or synthetic mode when the synthetic feature flag is enabled.
Function: read_can_synthetic
Publishes default TelemetryData at a ~1 ms interval for testing and CI. Logs throughput approximately once per second.
Struct: TelemetryData
Represents a fully decoded MCU telemetry packet received over CAN ISO-TP. Fields are decoded little-endian from a fixed-layout binary frame.
| Field | Type | Notes |
|---|---|---|
apps_travel | f32 | Normalized accelerator pedal travel |
bse_front | f32 | Front brake sensor |
bse_rear | f32 | Rear brake sensor |
imd_resistance | f32 | Isolation monitoring measured resistance |
imd_status | u32 | Raw IMD status bits — interpret against MCU spec |
pack_voltage | f32 | HV pack voltage |
pack_current | f32 | HV pack current |
soc | f32 | Battery state of charge |
discharge_limit | f32 | Current discharge limit |
charge_limit | f32 | Current charge limit |
low_cell_volt | f32 | Minimum cell voltage |
high_cell_volt | f32 | Maximum cell voltage |
avg_cell_volt | f32 | Average cell voltage |
motor_speed | f32 | Motor rotational speed |
motor_torque | f32 | Instantaneous output torque |
max_motor_torque | f32 | Configured torque limit |
motor_direction | MotorRotateDirection | |
motor_state | MotorState | |
mcu_main_state | MCUMainState | |
mcu_work_mode | MCUWorkMode | |
mcu_voltage | f32 | MCU DC bus voltage |
mcu_phase_current | f32 | MCU phase current |
mcu_current | f32 | MCU current draw |
motor_temp | i32 | Motor temperature |
mcu_temp | i32 | MCU temperature |
mcu_warning_level | MCUWarningLevel | Aggregated MCU warning severity |
shocktravel1–4 | f32 | Shock travel channels 1–4 |
dc_main_wire_over_volt_fault | bool | |
motor_phase_curr_fault | bool | |
mcu_over_hot_fault | bool | |
resolver_fault | bool | |
phase_curr_sensor_fault | bool | |
motor_over_spd_fault | bool | |
drv_motor_over_hot_fault | bool | |
dc_main_wire_over_curr_fault | bool | |
drv_motor_over_cool_fault | bool | |
dc_low_volt_warning | bool | |
mcu_12v_low_volt_warning | bool | |
motor_stall_fault | bool | |
motor_open_phase_fault | bool | |
over_current | bool (1 bit) | System-level protection flag |
under_voltage | bool (1 bit) | Supply below valid range |
over_temperature | bool (1 bit) | Temperature exceeded safe limit |
apps | bool (1 bit) | APPS fault flag |
bse | bool (1 bit) | BSE fault flag |
bpps | bool (1 bit) | BPPS fault flag |
apps_brake_plaus | bool (1 bit) | Accelerator/brake plausibility violation |
low_battery_voltage | bool (1 bit) | Battery low warning; followed by 24-bit pad |
Author: Lawrence Chan
MQTT Broker
Overview
mqttd() loads the embedded rumqttd.toml config, builds a rumqttd::Broker, and starts it.
Function: mqttd
Workflow:
- Reads
../rumqttd.tomlviainclude_str!. - Builds
config::Configfrom TOML. - Deserializes into broker config.
- Creates
Broker::new(config)and callsbroker.start().
Error Handling:
- Logs and returns if config load fails.
- Logs and returns if config deserialization fails.
- Logs if broker startup fails.
Author: Alistair Keiller
Telemetry Fan-Out (MQTT + TDengine)
Overview
send_message() serializes a telemetry reading once, attaches a ts field, then fans out to both MQTT and TDengine.
Function: send_message
Workflow:
- Serialize message to JSON; insert
tswith the provided timestamp. - Publish JSON to MQTT topic
T::topic()at QoSAtMostOnce. - Convert to TDengine schemaless line protocol and enqueue for write.
Backpressure / error behavior:
- Serialization failure → log, drop
- MQTT queue full → warn, drop; publish error → log
- Line protocol conversion failure → log, drop
- TDengine queue full → warn, drop; channel error → log
Runtime Singletons
get_mqtt_client — lazily creates an AsyncClient (OnceCell), spawns the MQTT event loop. On poll error: logs and retries after 1 second.
get_tdengine_sender — lazily creates a channel sender (OnceCell), ensures the fsae database exists, and spawns 4 worker tasks sharing one receiver. Workers batch up to 5,000 records per write. After 10 consecutive write failures, drops and recreates the database.
Trait: Reading
Requires Serialize. Implementors define topic() -> &'static str to specify the MQTT/TDengine measurement name.
Function: now_ms
Returns current UNIX time as milliseconds (u64).
Virtual Simulator for Vehicle Testing
Author: -
Godot Game Engine Simulation
Author: Lawrence Chan
Overview
Virtual simulation utilizing Godot Game Engine for testing vehicle characteristics / autonomous driving.
Vehicle Controller Script (Godot – VehicleBody3D)
Overview
This script implements a basic vehicle controller for a Godot VehicleBody3D node.
It handles:
- Acceleration and engine force
- Braking
- Steering control
- Natural deceleration
- Speed limiting
- Debug speed output
The script reads player inputs and updates the physics behavior of the vehicle’s VehicleWheel3D nodes accordingly.
Node Requirements
The script must be attached to a VehicleBody3D node.
The vehicle should contain child nodes of type:
VehicleWheel3Dwithuse_as_traction = true(drive wheels)VehicleWheel3Dwithuse_as_steering = true(steering wheels)
Input Controls
| Key | Action |
|---|---|
| W | Accelerate |
| A | Turn left |
| S | Brake |
| D | Turn right |
| C | Reset steering to center |
These must be mapped in Project Settings → Input Map:
acceleratedeceleratesteer_leftsteer_rightsteer_center
Configuration Constants
Debug
const DISPLAY_DEBUG_SPEED = true
Prints vehicle speed and steering data to the console.
Engine / Acceleration
| Constant | Description |
|---|---|
| MAX_POWER | Maximum engine force |
| ACCELERATION_STEP | Increment applied to engine force when accelerating |
| USE_DYNAMIC_THROTTLE | Enables dynamic throttle based on speed |
| MOTOR_RAMP_DOWN_STEP | Rate engine force decreases when not accelerating |
Braking
| Constant | Description |
|---|---|
| BRAKING_STEP | Brake force increment |
| BASE_DECEL | Passive braking when no throttle is applied |
| MAX_BRAKING | Maximum brake force |
Steering
| Constant | Description |
|---|---|
| STEER_STEP | Steering change per frame |
| MAX_STEERING_ANGLE | Maximum wheel steering angle in degrees |
Speed Limit
const MAX_VEHICLE_SPEED_MPH = 90.0
Maximum allowed vehicle speed.
Internally the script uses m/s and km/h, converting to mph only for debug display.
Core Variables
| Variable | Purpose |
|---|---|
| previous_displayed_speed | Prevents duplicate debug prints |
| steer_normalized | Normalized steering value for debugging |
Utility Functions
Degree / Radian Conversion
func deg_to_rad(deg):
return deg * PI / 180
func rad_to_deg(rad):
return rad * 180 / PI
Used for steering calculations.
Speed Conversion
func kph_to_mph(kph) -> float:
return kph / 1.609
Converts kilometers per hour to miles per hour.
Throttle Function
func throttle_function(current_speed) -> float:
# Connect engine power data here
return 1000.0
Returns engine force when dynamic throttle is enabled.
This is currently a placeholder and can be replaced with a realistic engine torque curve.
Normalized Steering Angle
func norm_steering_angle(steer: float) -> float:
return steer * (90/PI)
Converts steering radians into a normalized value for debugging.
Physics Update Loop
Main vehicle logic runs inside:
func _physics_process(delta: float) -> void:
This function performs:
- Input processing
- Debug speed calculation
- Wheel physics updates
Speed Calculation
Vehicle speed is calculated from the body’s velocity:
var velocity_mps = linear_velocity.length()
Conversions:
- m/s → km/h:
mps * 3.6 - km/h → mph:
kph / 1.609
Example debug output:
VEHICLE SPEED | 72 km/h [20 m/s] (45 mph) | STEER: 0.4
Wheel Processing
The script loops through all child nodes:
for object in get_children():
If the node is a VehicleWheel3D, it is processed depending on its role.
Traction Wheels
If:
wheel.use_as_traction
The script applies engine and braking forces.
Acceleration
Engine force increases while:
- Below
MAX_POWER - Below
MAX_VEHICLE_SPEED
Braking
Brake force increases up to:
MAX_BRAKING
Engine force is set to zero when braking.
Natural Deceleration
When neither accelerating nor braking:
- Engine force gradually decreases
- Base braking (
BASE_DECEL) is applied
Steering Wheels
If:
wheel.use_as_steering
The script adjusts the wheel steering angle.
Steering changes are converted from degrees to radians because Godot steering uses radians.
Steering Limits
Maximum steering range:
± MAX_STEERING_ANGLE
If exceeded, the value is clamped.
Steering Reset
Pressing C resets steering:
wheel.steering = 0.0
Vehicle Behavior Summary
| Behavior | Description |
|---|---|
| Acceleration | Applies engine force to traction wheels |
| Braking | Applies brake force and disables engine force |
| Steering | Rotates steering wheels within limits |
| Natural slowdown | Engine force gradually decreases |
| Speed limiting | Prevents vehicle exceeding maximum speed |
| Debug output | Displays speed and steering data |
Possible Improvements
- Implement a realistic engine torque curve
- Add gear ratios and transmission
- Implement traction control
- Add drift or slip simulation
- Display speed using a UI element instead of console output
Example Node Structure
VehicleBody3D
│
├── VehicleWheel3D (FrontLeft)
├── VehicleWheel3D (FrontRight)
├── VehicleWheel3D (RearLeft)
└── VehicleWheel3D (RearRight)
Typical configuration:
| Wheel | Traction | Steering |
|---|---|---|
| Front Left | No | Yes |
| Front Right | No | Yes |
| Rear Left | Yes | No |
| Rear Right | Yes | No |
Summary
This script provides a basic but functional vehicle physics controller using Godot’s built-in vehicle system.
It demonstrates:
- Player input handling
- Vehicle physics updates
- Wheel-based acceleration and steering
- Debug speed monitoring
The system is designed to be simple, modular, and easily extendable for more advanced driving simulations.
Inverter Simulation
Author: -
Reinforcement Learning
Godot RL Agents Integration for Autonomous Driving
Author: Mikayla Lee
Overview
The Godot RL Agents integration enables reinforcement learning agents to train autonomous driving policies on the AER simulator. This system bridges the Godot physics simulator with RL training libraries, allowing any standard AI RL agents to learn driving behaviors in a virtual environment.
The integration serves as the interface layer between:
- Godot car physics simulator
- Stable-Baselines3 PPO training algorithms
- Future autonomous driving control systems
System Architecture
The RL training pipeline consists of:
- GodotEnv Wrapper - Connects RL agents to the Godot simulator
- Action Space - Defines steering and throttle controls (2D continuous space)
- Observation Space - Captures car telemetry (position, velocity, speed)
- PPO Training Model - Implements Proximal Policy Optimization for policy learning
- Reset/Step Functions - Handles episode management and action execution
The system uses the Godot RL Agents library to establish direct communication between the Python training environment and the Godot game engine, eliminating the need for manual WebSocket implementation.
Implementation Details
Environment Configuration
class GodotCarEnv(GodotEnv):
def __init__(self, env_path=None, port=11008, show_window=True, seed=0):
super().__init__(
env_path=env_path,
port=port,
show_window=show_window,
seed=seed
)
The environment wrapper inherits from GodotEnv and manages:
- Connection to Godot executable on port 11008
- Visual rendering control for training monitoring
Action Space
Actions are represented as a 2D continuous vector [steering, throttle]:
| Control | Range | Mapping |
|---|---|---|
| Steering | -1.0 to 1.0 | -20° to +20° |
| Throttle | -1.0 to 1.0 | Full brake to full gas |
Observation Space
The agent receives 7D telemetry data per timestep:
- Position (x, y, z) - 3D coordinates in world space
- Velocity (vx, vy, vz) - 3D velocity vector
- Speed - Scalar magnitude of velocity
Training Pipeline
The system uses Proximal Policy Optimization (PPO) with the following arameters:
| Parameter | Value | Purpose |
|---|---|---|
| Learning Rate | 3e-4 | Gradient descent step size |
| Steps per Update | 2048 | Experience collection before update |
| Batch Size | 64 | Mini-batch size for optimization |
| Epochs | 10 | Training iterations per update |
| Gamma | 0.99 | Discount factor for future rewards |
Integration Workflow
The RL training loop operates as follows:
-
Start:
reset()resets car to starting position → returns initial observation -
Action Execution:
Agent predicts action based on current observation →step(action)sends controls to Godot -
Simulation Update:
Godot applies physics, updates car state → returns new observation and reward -
Learning:
PPO updates policy based on collected experience → repeat until convergence
This cycle runs for 100,000 timesteps during initial training, with the trained model saved for deployment.
Current Status & Next Steps
Completed:
- Researched and integrated Godot RL Agents library
- Implemented GodotEnv wrapper with action/observation spaces
- Configured PPO training pipeline with Stable-Baselines3
- Established reset/step function architecture
In Progress:
- Creating basic test simulator in Godot to validate integration
- Working with other daq members to fully integrate RL wrapper with car physics simulation
Future Work:
- Implement reward shaping for racing-specific behaviors (staying on track, lap time optimization)
- Add termination conditions (crash detection, lap completion)
Dependencies
pip install godot-rl stable-baselines3