Author: Karan Thakkar
System Architecture
---
config:
theme: 'base'
themeVariables:
primaryColor: '#ffffffff'
primaryTextColor: '#000000ff'
primaryBorderColor: '#17007cff'
lineColor: '#000000ff'
secondaryColor: '#f3f3f3ff'
tertiaryColor: '#f3f3f3ff'
---
flowchart BT
%% This is a comment for the entire diagram
subgraph CAN[" "]
BMS(Orion BMS 2)
BC(Battery Charger)
PCC(PCC - Teensy 4.0)
INV(DTI HV550)
RPI(Raspberry Pi)
MOTOR(Motor) === INV
end
CCM(CCM - Teensy 4.1)
%%CAN LOOP1
BMS <--> |CAN1| BC <--> |CAN1| PCC <---> |CAN1| CCM
%%CANLOOP2
INV<-----> |CAN2|CCM<---> |CAN1 + CAN2|RPI
subgraph Analog[Analog]
direction LR
B(Brake Sensors)
A(Pedal Position Sensors)
LPOT(Suspension Travel Sensors)
TR(Thermistors)
end
subgraph PWM[PWM]
direction LR
W(WheelSpeed Sensors)
FP(Fans & Pumps)
SP(Speaker & Amp)
end
subgraph MISC[Digital]
direction LR
RTM(Ready To Move Button)
BL(Brake Light)
end
Analog --> CCM
PWM --> CCM
MISC -->CCM
---
config:
theme: 'base'
themeVariables:
primaryColor: '#ffffffff'
primaryTextColor: '#000000ff'
primaryBorderColor: '#17007cff'
lineColor: '#000000ff'
secondaryColor: '#f3f3f3ff'
tertiaryColor: '#f3f3f3ff'
---
flowchart LR
PCC(Precharge Status) --> CCM
A(Analog Inputs) --> CCM
D(Digital Inputs) --> CCM
CCM(Teensy MCU) --> IC(Inverter Commands) --> Motor(Motor Control)
CCM --> Raspi(Raspi) --> Dashboard(Dashboard: Driver + Pit)
CCM --> PWM(PWM Output) --> CC(Cooling Control)
style CCM fill:#00FF00,stroke:#333,stroke-width:2px
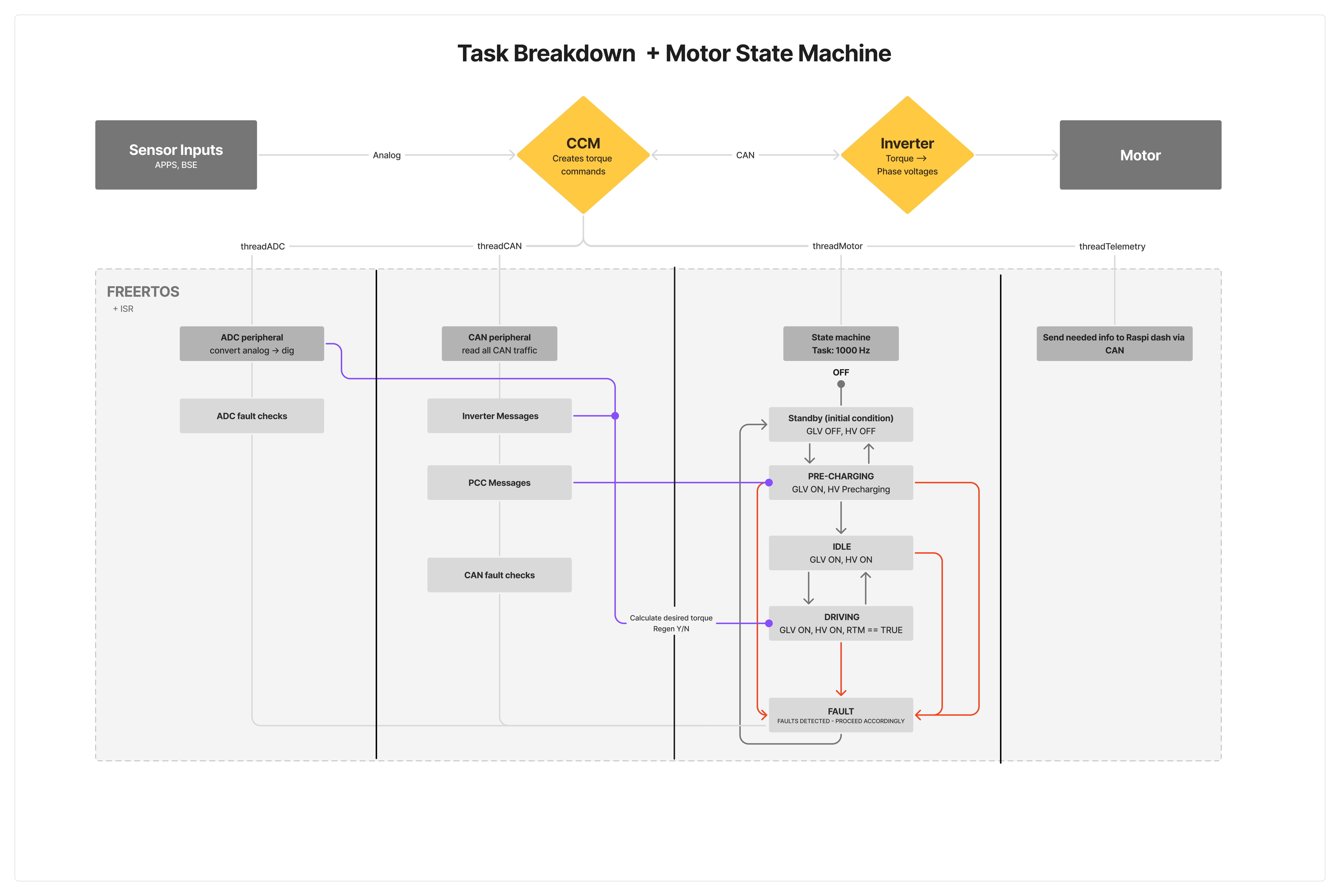
Tasks and Threads